月ピンポイント着陸成功への「1000本ノック」
—SLIM 航法誘導制御エンジニアの格闘
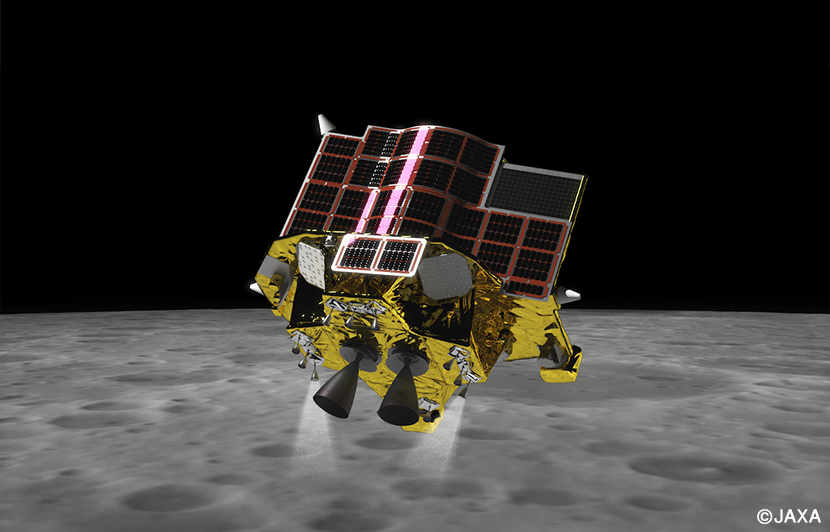
月ラッシュが始まっている。日本を含む世界中の政府機関やスタートアップが月を目指ししのぎを削っているが、目的はまず月に着陸すること。2023年夏以降にH-IIAロケットで打ち上げ予定のJAXAの小型月着陸実証機 SLIMは、その先を見据える。降りられる場所に降りるのでなく、精度100m(従来は数km~十数km)で降りたい場所にピンポイントで着陸することを目標に掲げているのだ。そのSLIMがいよいよ月に向けて飛び立とうとしている!
今年~来年、SLIMが月でピンポイント着陸を成功させれば、おそらく「世界初」の快挙となるだろう。だが、日本にはこれまで月着陸の実績がない。にもかかわらず、100m以内という高精度の着陸を目指す。ピンポイント月着陸を実現するには、自分の位置を正確に知り、目的地に向かって位置や速度などを探査機自身が精密にコントロールする、「航法誘導制御」の技術が欠かせない。

SLIMのシステム開発と製造を担った三菱電機エンジニアたちにとって、静止軌道(高度約36,000kmの地球周回軌道)より遠くへ行く探査機を作るのも、初めての経験だった。開発に格闘する中で「1000本ノック」を何度も実施。月着陸までの約30分の飛行シミュレーションを1000回すべて成功するまで繰り返した。開発の苦労や工夫について、三菱電機担当者に聞いた。

どうやって月にピンポイント着陸するの?
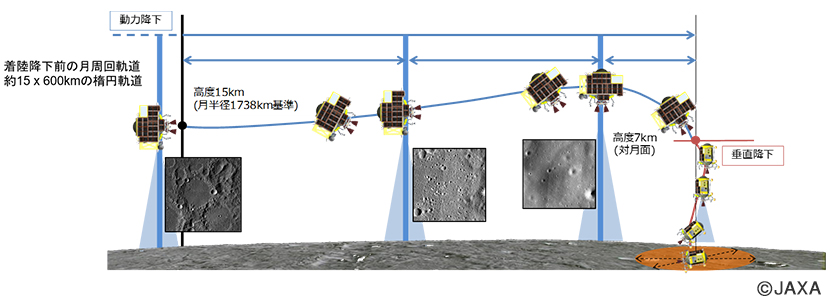
まずは、どうやって月にピンポイント着陸をするのか見ていこう。2023年1月時点の計画によると、SLIMは打ち上げから3~4か月後に月周回軌道に到着、約1ヶ月間月を周回した後に、いよいよ着陸を目指す。高度約15kmから秒速約1700m(旅客機の約7倍のスピード)で降下スタート。着陸までの時間は約20~30分。
JAXAウェブサイトによると、SLIM着陸降下を日本列島に重ねた場合、新千歳空港を出発し約20分後に阪神甲子園球場上空に到達、着陸する(移動距離約1000km)ことになるそう。その挑戦がいかに難しいものかイメージできる。
SLIMの月着陸は大きく分けて「動力降下」と「垂直降下」のフェーズにわかれる。万が一途中でコースを外れても、後戻りできない一発勝負。ピンポイント着陸成功の鍵を握るのは「画像照合航法」と「自律的な航法誘導制御」だ。画像照合航法については以前のコラムで紹介した(欄外リンク参照)が、飛行中にSLIMが撮影した月表面の画像からクレーターを抽出。クレーターの配置パターンと、探査機がもつクレーターの地図を比べて、「このクレーターのパターンが見えるのは月面上のここだ」と自分の位置を1~2秒で特定する。
画像照合航法は目的地にピンポイントに向かうための最強のツールであることは間違いないが、ほかにもSLIMはたくさんのセンサ類を搭載している。それらを適宜使い分けながら、SLIMの位置と目的地までの経路を自分で算出、万が一機器にトラブルがあっても月着陸を成功させる「自律的な航法誘導制御系」を開発することが、三菱電機チームに求められた。
たとえば動力降下中、SLIMは常に画像照合航法を続けるわけではない。上の画像中青く示された場所で、5回カメラを月面に向けて画像を撮影する。そのほかの時間帯は、SLIMに搭載した加速度計とジャイロで自分の速度や姿勢等を計測する「慣性航法」を行っている。慣性航法はロケットなど宇宙機で広く用いられている航法だ。
「慣性航法は『速度がこれくらい出ているから、今このあたりにいるはず』という足し算なので、結果(=位置)がちょっとずつずれていくんです。そこで画像照合航法を時々行って位置の修正をかけます」。SLIMの航法誘導制御を担当した三菱電機の澤山敬太さんはそう説明する。慣性航法だけでは位置の誤差が徐々に大きくなり、ピンポイント着陸ができない。画像照合航法(JAXAが大学などと開発)を時折行うことによって、SLIMは今、月面上のどこを飛んでいるかという正確な位置を把握できるわけだ。

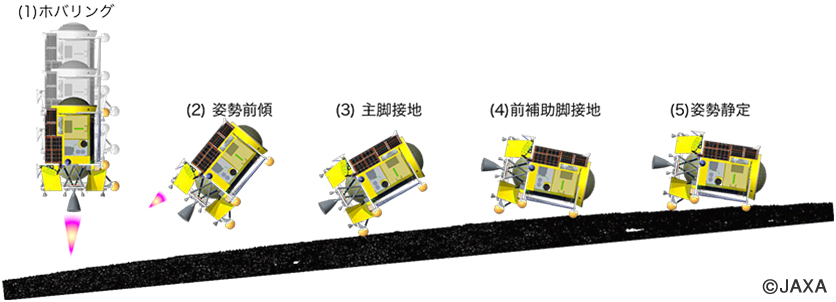
着陸地点上空までたどり着くと、次にSLIMは「垂直降下」のフェーズに入る。高度約7kmの地点から着陸まで5分以内。レーダを使って高さや速度を計測しながら、月に向かって降りていく。降下開始直後は秒速50~60m(時速約200km)のハイスピードだが、スラスタを精密に噴射することで徐々に減速していく。
高度約50m地点で月面の画像を撮り、約15センチの岩があったら「避けるべし」と判断。岩がなさそうなところを自分で探し出し、着陸目的地に向かって降下する。岩をよけるために横方向に10mぐらいは移動可能だという。画像を撮ってから着陸地を選ぶまでの時間は?「スペック上は5秒ですが、実際に試験をすると1~2秒で返事が来ます」(澤山さん)。めちゃくちゃ早い!それもそのはず、50m上空で障害物を検知してから着陸までは20~30秒。迅速な判断が肝となるのだ。月面近くではレーザレンジファインダ距離計を使って月面との距離を精密に測りながら着陸する。着陸ターゲットは「神酒の海」にあるSHIORIクレーター。月内部から出てきたと推定される「かんらん石」がある場所だ。
ところでどうやってピンポイント着陸に成功したかを判断するのか?「垂直降下中、SLIMは何枚かの月面の写真を撮影します。着陸後に地球に送信することになっているので、その画像を見れば『月面のここに着陸したんだ』とわかるはずです。」(澤山さん)。
冗長系なし!「何かが壊れても絶対に着陸させる」ために
澤山さんたち航法誘導制御チームにとって、難しかった点は大きく二つ。一つは月に着陸する技術を、一から作らなければならなかったこと。「(三菱電機は)人工衛星では歴史を積み重ねているので、これをベースに作ればいいという土台がある程度確立している。でも月着陸機は未経験ですごく大変でした」(澤山さん)。
人工衛星の場合、位置はGPSなどの測位衛星でわかるし、基本的に姿勢の制御だけをすればいい。時々刻々と位置などをコントロールする航法誘導制御について三菱電機は宇宙ステーション補給機 こうのとり(HTV)で経験したが、今回は画像照合航法や複数のセンサ類を組み合わせるなど、さらに難易度の高い技術が要求された。
二つ目はSLIMが軽量化を目的に掲げたため、冗長系をもたないこと。冗長系とは、重要な機器類が壊れた場合に備えて予備の機器類を用意しておくこと。壊れても修理にいけない宇宙機では、冗長系を組むのが常識だ。「冗長系がないなら、残ったもので何ができるか考えないといけない。(何があっても)ソフトウェアとして動くように、設計するのが難しかった」。これまで人工衛星の仕事を担ってきた澤山さんは、まず自分の中の常識をリセットすることから始めなければならなかった。
例えば、と澤山さんが工夫の一例として紹介してくれたのが、画像航法用のカメラ。「カメラは動力降下中に撮影するカメラと垂直降下中に撮影するカメラの2台があります。どちらかのカメラが壊れたら、もう一つのカメラを本来の向きとは違う方向に向けて写真を撮るようにアルゴリズムに入れました」。トラブル時に機器を本来とは異なる使い方ができないか、運用でカバーできないか知恵を絞った。「JAXAさんと議論を繰り返して『これが壊れたらこうしよう』と多数のパターンを考えて、SLIMに機能を持たせてあります」。

最終審査会ギリギリまで繰り返した「1000本ノック」
経験のない月着陸。しかも100m以内のピンポイント着陸。設計通りにSLIMは動いてくれるのだろうか。地上では宇宙と同じようにエンジンを噴射させたり探査機を動かしたりできないため、コンピュータ上でシミュレーションを行うしかない。澤山さんたちチームは2022年夏から、月着陸降下シミュレーションを繰り返した。「ちょっとずつ条件を変えて1000回。1000回全部成功するまでやるんです」。最初はどうしてもうまくいかない。「一つ一つ『なんでだろう』と調べて追い込む作業が、数か月続きました」(澤山さん)。
最後の追い込みがなかなか終わり切らない。SLIMを種子島に送り出す前の最終審査会ギリギリまで解析とチューニングを続けた結果、ついに1000回すべてピンポイント着陸に成功。「しかも思ったところに綺麗に入っているぞ」と納得できる到達点にたどり着いた。
1000本ノックを完璧に決めるまで精度をあげても、澤山さんは「本番は怖い」と吐露する。「やっぱりやってみるまでわからない。それは制御系のエンジニアの宿命です。頑張ってシミュレーションしても、宇宙で動くまで絶対大丈夫という自信が持てない世界なんです。SLIMが月面から送ってきた写真を見たときに初めて、月にたどり着いた実感がわくと思います」

三菱電機・遠山大介さんは澤山さんの意見に同意しつつ、「最後は今までやってきたことを信じるしかない。航法誘導制御エンジニアとして辛いところでもあり、醍醐味でもある。SLIMが月から送ってくるテレメトリから設計通りの動きが見られたら嬉しいし、見られると信じている」と月ピンポイント着陸への期待を語った。
ピンポイント着陸の意義を改めて聞いた。「今、世界の月着陸機で『100m以内の精度で降ります』と言っているのはSLIMだけ。この2~3年で月に着陸するのは当たり前の世界になるかもしれない。次は着陸精度が求められる時代になるでしょう。有人月面開発が始まれば基地の上に着陸したり、離れすぎたりしたら困りますから。そうした一つ先の技術を、三菱電機が世界に先駆けて開発していると認識しています」(遠山さん)
次回は、三菱電機SLIMプロジェクトマネージャ・小倉祐一さんのインタビューを紹介します。
- ※
本文中における会社名、商標名は、各社の商標または登録商標です。

