開発の特長
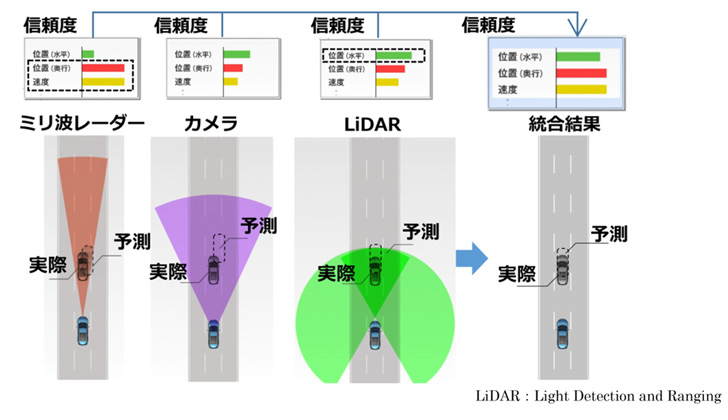
- 複数の車載センサー情報を信頼度に基づき選択・統合し悪天候でも高精度に検知
- 複数の車載センサーが検知した同一対象物の速度・車幅・向き・距離などの時系列データを瞬時に分析し、センサーごとの特性を基に、天候などにより変化する情報の信頼度を推定
- 複数のセンサーから得た信頼度の高い情報を選択・統合することにより、悪天候時でも高い検知精度を維持
- 悪天候でのAEB性能実験で効果を実証
- 実車を用いて、前方障害物の検知によるAEB※性能の実証実験を実施し、前方静止車両に接近する一定条件において、最大時速40km走行時でも衝突回避機能の作動を確認
- センサーの検知精度が落ちて作動しなかった悪天候時でも、衝突回避機能の作動を確認
- ※
Autonomous Emergency Braking:衝突被害軽減ブレーキ
開発の概要
| 検知手法 | 性能 | 環境 | 作動域 [km/h] |
||
|---|---|---|---|---|---|
| 今回 | 複数センサーで検知した障害物の情報を信頼度に基づき選択し統合 | 豪雨・濃霧時に AEB作動 |
雨量[毎時mm] | 80 | 10~40 |
| 霧・視程[m] | 15 | 10~15 | |||
| 従来 | 予め定めたセンサーの検知分担に基づき障害物の情報を取得し統合 | 豪雨・濃霧時に AEB作動不可 |
雨量[毎時mm] | 80 | 作動不可 |
| 霧・視程[m] | 15 | 作動不可 | |||
