最適な走行経路と車両制御で、
安全・安心かつ快適な乗り心地の自動運転に貢献します。
概要
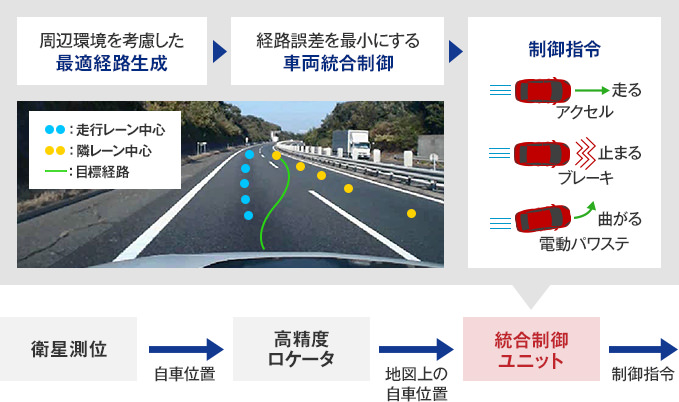
周辺の複雑な環境を考慮した最適経路生成技術と、経路誤差を最小にし、車両の運動能力を最大限に発揮する車両制御技術を開発。
安全・安心かつ快適な乗り心地の自動運転の実現に貢献します。
技術ポイント
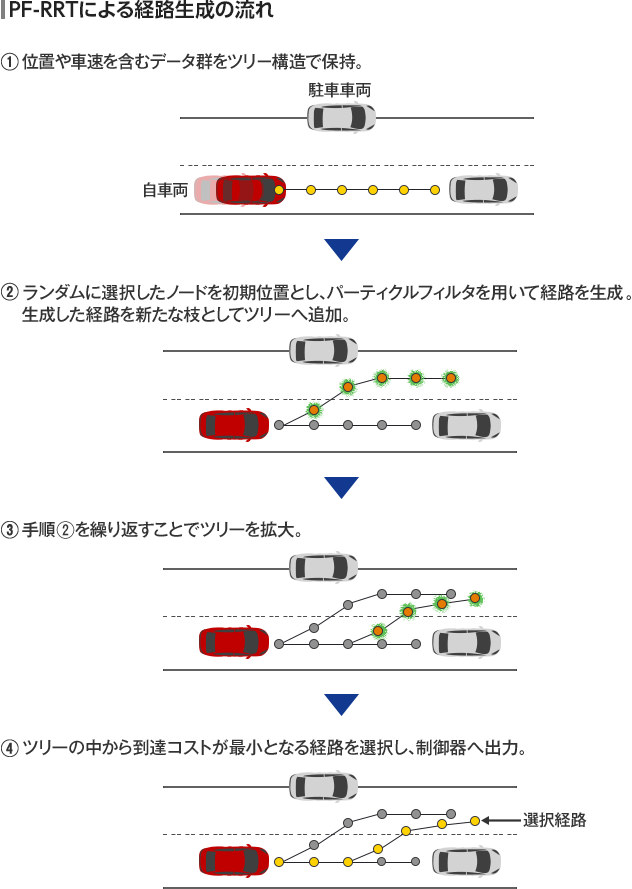
PF-RRTにより、周辺環境を考慮した滑らかな走行経路を生成
独自の経路生成手法「PF-RRT」を開発。パーティクルフィルタ※1により、車両が目標とする状態(目標とする車線の中央に位置する等)に近づくための状態変化を推定し、経路を生成。
さらにRRT※2を用いて、ツリー(走行経路の候補)を拡大し、その中から到達コスト(距離等)が最小となる経路を選択します。
これらにより複雑な環境に対応できる、滑らかな走行経路の生成が可能になりました。
NMPCにより、滑らかな走行で乗り心地のよい車両制御を実現
NMPC※3を用いて、車両の縦方向と横方向の運動を統合して制御するコントローラーを開発しました。
非線形な車両及びタイヤモデルにより、車両のハンドル角度と速度を最適化することで、生成した経路に高精度に追従。
経路誤差を最小限にして障害物を回避し、滑らかな走行で乗り心地のよい車両制御を実現します。
※1Particle Filter(PF):条件付き確率分布をパーティクル(粒子)と呼ばれるデータ群によって近似的に表現する状態推定器。
※2Rapidly-Exploring Random Tree:ツリー構造をとるデータ群を、乱数を用いて拡大し、その中から経路を探索する手法。
※3Nonlinear Model Predictive Control:非線形モデル予測制御。