人とロボットの遠隔融合が、働く環境を革新する

進化を続ける遠隔操作、
場所・距離の制約がない新時代の働き方を実現
近年、ワークライフバランスの推進などで新しい働き方が模索されています。より自由で豊かな生活を手にするには、働く環境の改善が必要です。誰もが、住みやすい土地、住みたい人と生活しながら、どこからでも働ける。三菱電機はそんな社会を目指し「人の認知特性を活用した進化型遠隔操作サービスプラットフォーム」の開発を進めています。当社は、ストレスフリーで遠隔操作が可能になる「VISUAL HAPTICS(ビジュアル ハプティクス)」をはじめ、複数台のロボットを遠隔で同時に監視・操作できる「自動化技術」など、より自由で、効率的な新時代の働き方を支援するソリューションに取組むことで、様々な制約を超えて、多様な人々がやりたいことを実現できるインクルーシブな社会に貢献します。
POINT01.直感的な遠隔操作が可能なVISUAL HAPTICS
力触覚伝達の課題であるオペレーターの負担を低減
力触覚とは、物を掴んだ時などに手に伝わる感覚のことです。従来は力触覚情報を伝えるために、オペレーターに専用のインターフェースを付け、物理的フィードバックを行ってきました。この方法では、装置の重さ等による肉体的負荷や、装置から伝わる感覚に違和感等があるといった課題があります。これを解決するのが「VISUAL HAPTICS」です。
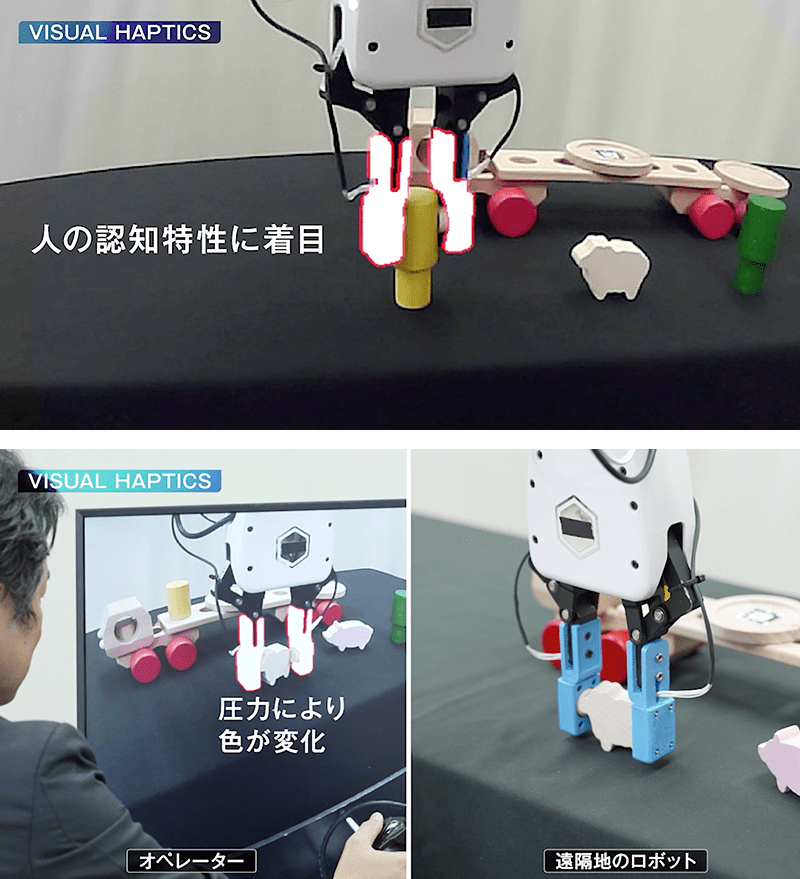
画面上に力触覚を色で表示、ストレスフリーで直感的な操作が可能
当社では、映像から力触覚を脳内に想起する人の認知特性に着目しました。「VISUAL HAPTICS」は、力触覚情報をARで画面上に色で表現します。例えば遠隔ロボットが物を掴んだ時に、圧力がかかった遠隔ロボットの指に色を表示し、その濃淡で圧力の強弱を示します。カメラ映像と同一の画面を介して力触覚を伝達でき、専用のインターフェースを装着する必要がないためオペレーターの負担を低減できます。さらに、同一画面で視覚情報・力触覚情報を同時に把握でき、直感的な操作が可能です。
POINT02.自然な映像と通信帯域の低減を両立するHUMAN EYE DISPLAY
人の視覚特性は、高解像度で立体視機能がある中央の視野と、低解像度で非立体視の周辺の視野から構成されます。この人の視覚特性からヒントを得て開発した「HUMAN EYE DISPLAY」。必要のない映像を事前に低減することで通信量を抑制しながら、遠隔操作時の作業性を落とすことなく、オペレーターに自然な映像を伝えることが可能になります。

POINT03.段階的な自動化技術で、遠隔操作での作業効率化を支援
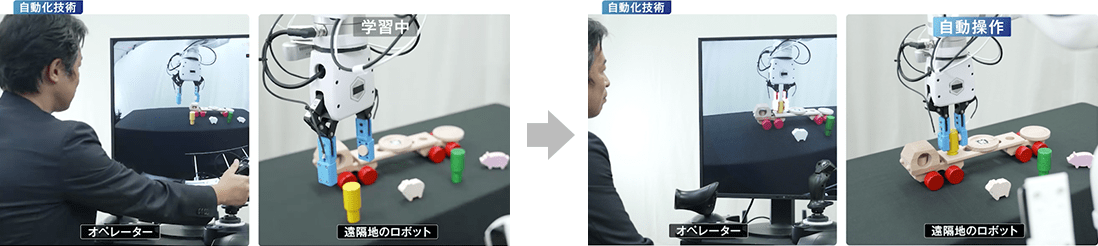
遠隔ロボットが人の操作を学習し、部分的な自動化で作業負担を低減
人の運動には頭で考えて行う随意運動と、無意識に行う運動があります。人は繰り返し随意運動を行うことで、その運動が意識せずともできるようになります。遠隔ロボットもオペレーターが繰り返し遠隔操作をすることで、当社AI技術「Maisart®(マイサート)※1」によってその動きを学習し、自動でできるようになります。例えば、物をA地点からB地点に運ぶといった単純な動作は遠隔ロボットが自動で、細かな動作はオペレーターが遠隔操作で行うなど、部分的に自動操作が可能になることで、オペレーターの作業負荷を低減できます。
※1Mitsubishi Electric’s AI creates the State-of-the-ART in Technology の略。全ての機器をより賢くすることを目指した当社のAI技術ブランド。
ひとりのオペレーターで複数の遠隔ロボットに対応、遠隔操作が大きく変わる
この「自動化技術」を応用すれば、ひとりのオペレーターが同時に複数の遠隔ロボットを監視し、多くの動作は遠隔ロボットが自動で行い、必要な時だけ遠隔操作するといった、今までとはまったく異なる遠隔操作のスタイルを確立できます。遠隔ロボットをオペレーターが1対1で操作する現在の方式に比べ、飛躍的に効率性が向上し、オペレーターの負担低減・省人化が可能になります。

共創クロストーク
福井大学 インタラクティブ・ロボティクス研究室 × 三菱電機
人の認知特性を活用した進化型遠隔操作サービスプラットフォームのための段階的な自動化技術
福井大学 インタラクティブ・ロボティクス研究室
-

高橋 泰岳
博士(工学)福井大学
学術研究院工学系部門
知能システム工学講座 教授2000年 大阪大学大学院工学研究科助教、2009年 福井大学大学院工学研究科講師、2012年 同准教授、2018年より同教授。
- 2000年 大阪大学大学院工学研究科助教、2009年 福井大学大学院工学研究科講師、2012年 同准教授、2018年より同教授。
-

今井 康太
福井大学
大学院工学研究科
知識社会基礎工学専攻
知能システム科学コース
三菱電機先端技術総合研究所
-

春名 正樹
博士(情報)三菱電機
先端技術総合研究所
メカトロニクス
技術部
機械動力学
グループ -

大坪 舜
三菱電機
先端技術総合研究所
センサ情報処理システム技術部
画像認識システム
グループ
-
卓 天成
福井大学
大学院工学研究科
知識社会基礎工学
専攻知能システム
科学コース -

牧田 真志
福井大学
工学部 機械・
システム工学科
ロボティクスコース -

畑 浩一
三菱電機
先端技術総合研究所
メカトロニクス
技術部
機械動力学グループ