 今年夏、日本の月探査機「セレーネ」が打ち上げられ、インドや中国、NASAの探査機が今年から来年にかけて次々と月をめざす「月ラッシュ」がスタートする。まずは月の周りを衛星が調べ、次にローバ(月面探査車)などのロボットが月面におりたち情報収集。その情報を元に、月面基地建設場所のあたりをつけたら、再びロボット達が基地建設の下準備。そしていよいよ人間が月に向かい、ロボットをパートナーに本格的建設に入る。こんなふうに、今後の月面開発はロボットの活躍なくして成り立たないと言っていいほど。
今年夏、日本の月探査機「セレーネ」が打ち上げられ、インドや中国、NASAの探査機が今年から来年にかけて次々と月をめざす「月ラッシュ」がスタートする。まずは月の周りを衛星が調べ、次にローバ(月面探査車)などのロボットが月面におりたち情報収集。その情報を元に、月面基地建設場所のあたりをつけたら、再びロボット達が基地建設の下準備。そしていよいよ人間が月に向かい、ロボットをパートナーに本格的建設に入る。こんなふうに、今後の月面開発はロボットの活躍なくして成り立たないと言っていいほど。
一方で、すでに宇宙ステーションではロボットアームがなくてはならない存在になっているし、小惑星探査機「はやぶさ」もロボット探査機。自分で判断し、小惑星イトカワに自律的に降りたってサンプル採取に挑戦。元々人工知能の専門家であり画期的なロボットを生み出してきた北野宏明氏は「あんな大事な場面で自律制御をした『はやぶさ』ロボティクスは立派」と絶賛する。
だが、今の日本の宇宙ロボット開発に、世界をリードする日本の産業ロボットやヒューマノイドなどサービスロボットの技術はまだ活かされていない。そこでJAXAは、「宇宙ロボットフォーラム」を立ち上げ企業、大学、研究機関等のロボティクス研究者に広く参加を呼びかけることになった。
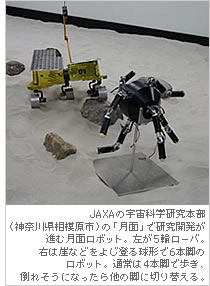
 例えば、現在日本が開発を進めているロボットの一つに「月面ローバ」がある。相模原の宇宙科学研究本部には月の砂を模した細かい砂を敷き詰め、岩を配置した「月面」が作られ、スタックしたり倒れたりせず安定して走るローバの研究開発が行われている。ポイントは2つ。一つはごつごつした岩や滑りやすい砂(レゴリス)の広がる環境で柔軟に走ること。もう一つは、自律機能。月との通信は往復で2.7秒、画像データなどの伝送にはもっと時間がかかる。走っている途中に常に地球からの指示を待つわけにはいかないので、大きな岩や穴を自分で判断してよけるなどの機能をもたせることだ。開発に携わっている久保田孝助教授は、「ぜひ産業界と交流を持ちたい。精密にモノを作る産業ロボットの技術や、たくさんの小さいモータを動かすヒューマノイド等、色々な技術がかなり使えると思っています。また宇宙という極限環境で動くロボットの技術は地上でも使えるはずです。」と産業界との密な交流に期待する。
例えば、現在日本が開発を進めているロボットの一つに「月面ローバ」がある。相模原の宇宙科学研究本部には月の砂を模した細かい砂を敷き詰め、岩を配置した「月面」が作られ、スタックしたり倒れたりせず安定して走るローバの研究開発が行われている。ポイントは2つ。一つはごつごつした岩や滑りやすい砂(レゴリス)の広がる環境で柔軟に走ること。もう一つは、自律機能。月との通信は往復で2.7秒、画像データなどの伝送にはもっと時間がかかる。走っている途中に常に地球からの指示を待つわけにはいかないので、大きな岩や穴を自分で判断してよけるなどの機能をもたせることだ。開発に携わっている久保田孝助教授は、「ぜひ産業界と交流を持ちたい。精密にモノを作る産業ロボットの技術や、たくさんの小さいモータを動かすヒューマノイド等、色々な技術がかなり使えると思っています。また宇宙という極限環境で動くロボットの技術は地上でも使えるはずです。」と産業界との密な交流に期待する。
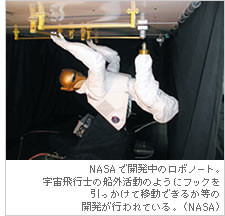 また、3月28日に行われたシンポジウム「宇宙一のロボット王国ニッポンを目指して」でJAXA宇宙ロボット推進チーム事務局長小田光茂氏は「人間と協働できるロボットの実現は地上でもまだ実現しておらず、今後の技術開発競争の目玉」と話した。具体的には宇宙飛行士の船外活動で、飛行士の作業用足場を確保するようなロボットが実現できれば、飛行士の作業はかなり軽減できるだろう。また直接作業を手伝うというよりは、たとえば月面活動で人間が細かく指図をしなくても珍しい資源を探してきてくれるなど、人間と役割分担をする「相棒」となるロボットがいれば、放射線のふりそそぐ月面環境での活動がぐんと楽になるはずだ。
また、3月28日に行われたシンポジウム「宇宙一のロボット王国ニッポンを目指して」でJAXA宇宙ロボット推進チーム事務局長小田光茂氏は「人間と協働できるロボットの実現は地上でもまだ実現しておらず、今後の技術開発競争の目玉」と話した。具体的には宇宙飛行士の船外活動で、飛行士の作業用足場を確保するようなロボットが実現できれば、飛行士の作業はかなり軽減できるだろう。また直接作業を手伝うというよりは、たとえば月面活動で人間が細かく指図をしなくても珍しい資源を探してきてくれるなど、人間と役割分担をする「相棒」となるロボットがいれば、放射線のふりそそぐ月面環境での活動がぐんと楽になるはずだ。
ロボット技術を総動員し、宇宙で日本ならではオリジナルな活動ができるか、その第一歩が始まった。
|