シンプルモーションユニット 特長

FX5-80SSC-S/FX5-40SSC-S

特長
小型装置の高性能化に貢献する、同期・カム制御
シンプルモーションユニットは食品機械や包装機械などに必要な同期制御、カム制御を搭載し、高性能サーボアンプと組み合わせて装置の小形化、高性能化に貢献します。また、充実したエンジニアリング環境で、思いどおりの装置を簡単に構築できます。
集中管理で立上げ時間を短縮する、SSCNETIII/H
シンプルモーションユニットで複数のサーボアンプのパラメータを一元管理することで、立上げ時間を短縮します。リアルタイム通信により、サーボアンプの消費電力や積算電力量などの運転情報をモニタでき、メンテナンス時間の削減に貢献します。
様々な駆動機器を接続
回転型サーボモータだけでなく、リニアサーボモータ、ダイレクトドライブモータ、インバータFR-A800シリーズ、パートナーメーカの機器などを接続できます。
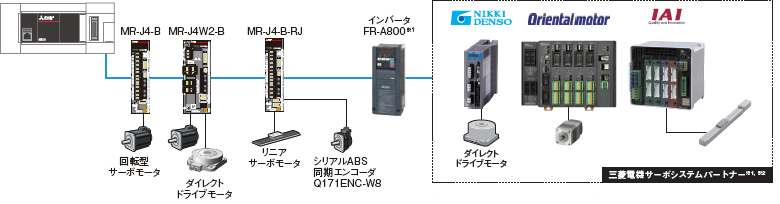
- ※1:パートナー製品、およびインバータFR-A800は、シンプルモーションユニットに対応したバージョンを使用してください。
- ※2:パートナー製品の詳細は、サーボシステムパートナーコンテンツを参照してください。
シンプルモーションユニットで広がる、高性能化への選択肢



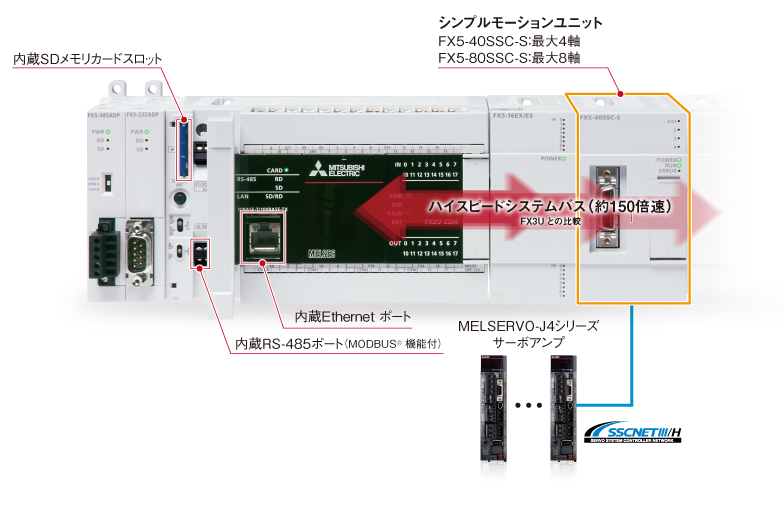
高速同期ネットワーク SSCNETIII/H
- データ送受信を従来比3倍の双方向150Mbps(片方向300Mbps)へと高速化。
システムの応答性を飛躍的に向上します。 - 通信周期0.222msの高速シリアル通信により、装置のスムーズな制御を可能にします。
- 完全同期通信により、高精度な同期が必要な装置の高性能化を実現します。
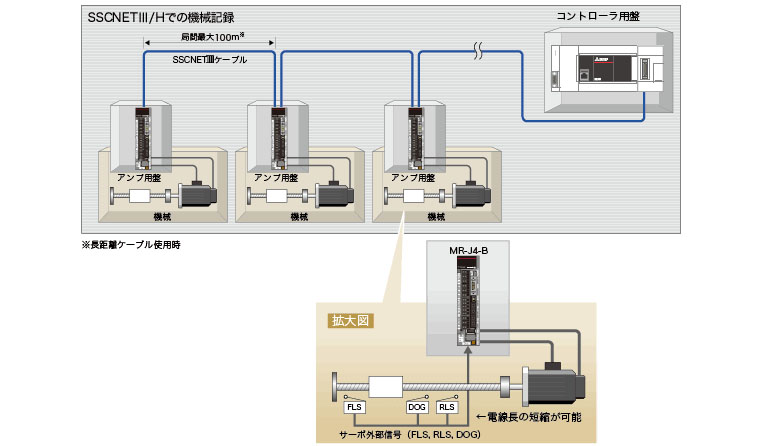
- 1系統あたり最大3200m(局間最大100m×最大制御軸数32軸)の長距離配線が可能。
大規模システムにも対応できます。 - 同一系統にSSCNETⅢ/H対応サーボアンプとSSCNETⅢ対応サーボアンプを混在して使用できます。(混在時の通信速度:双方向50Mbps)
- SSCNET (Servo System Controller Network)

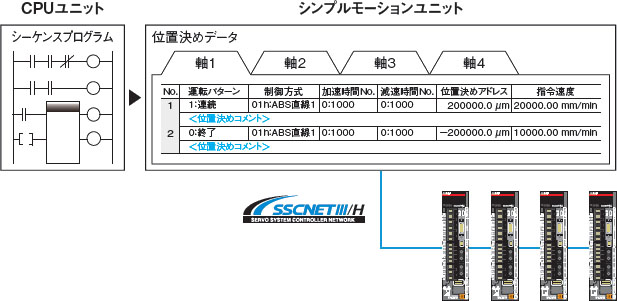
位置決め制御
シーケンスプログラムからポイントテーブル方式の位置決めデータを始動することにより、簡単に位置決め制御が可能です。直線補間、2軸円弧補間、定寸送り、および連続軌跡など豊富な制御で様々な用途に対応します。
同期・カム制御
アドバンスト同期制御
ギア、シャフト、クラッチ、変速機、カムなどの機械機構をソフトウェアに置き換えた同期制御に加え、カム自動生成機能によりカム生成を簡単に実現できます。軸ごとに同期制御の始動、停止ができ、同期制御軸と位置決め制御軸の混在が可能です。
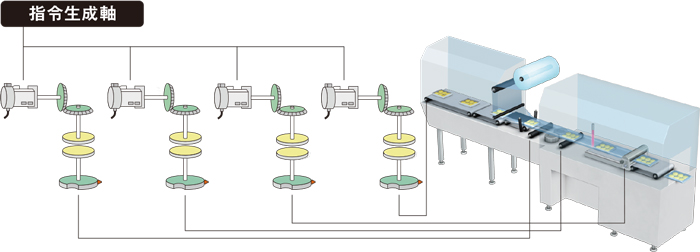
- 【指令生成軸とは】
- 指令生成軸は、指令生成のみを行う軸です。サーボアンプが接続された軸とは独立して制御することができます。
(制御軸にカウントされません。)
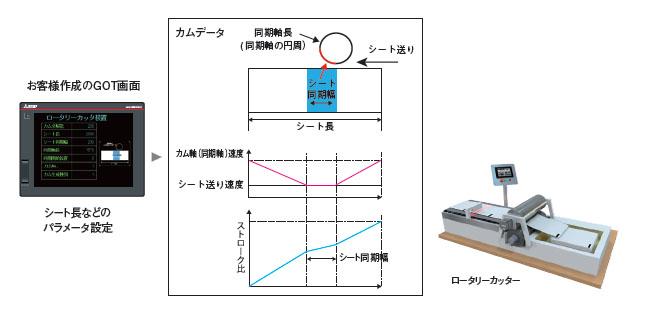
カム自動生成
ロータリーカッター用カムデータを自動で生成します。
GOT画面から指定したデバイスにシート長、同期幅、カム分解能などを入力するだけで、最適なカムデータを生成します。
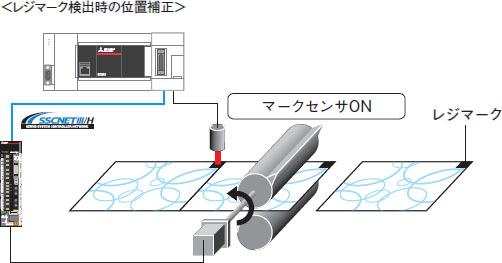
マーク検出機能
高速で移動する包装紙のレジマークによるセンサ入力で、サーボモータの実現在位置を取得できます。レジマーク入力時のカッター軸の位置を補正することで、包装紙を一定の位置でカットすることができます。
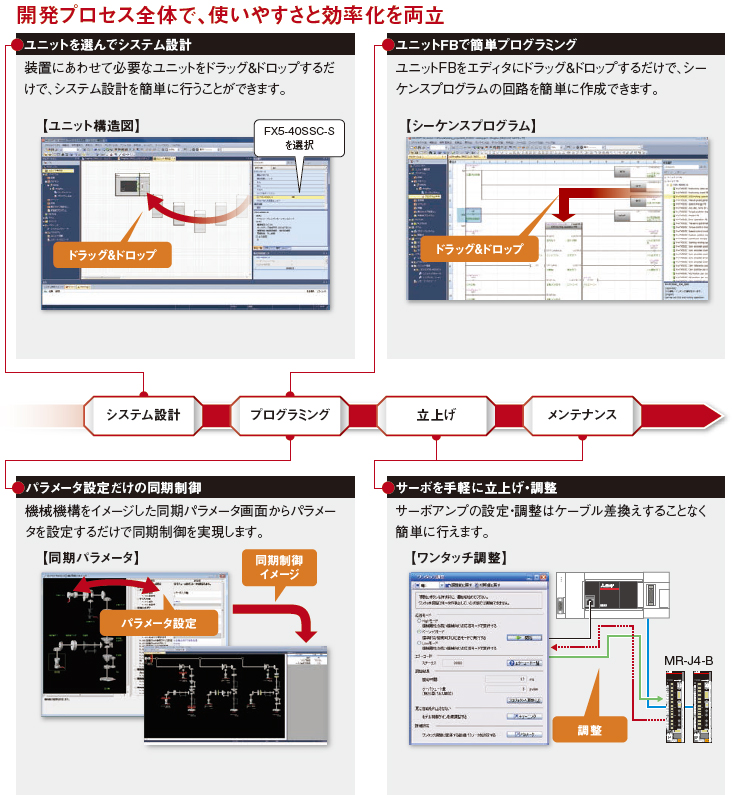
エンジニアリング環境
「選ぶ」だけの簡単プログラミング MELSOFT GX Works3
シーケンスプログラムはもちろん、シンプルモーションユニットのパラメータ、位置決めデータやカムデータの作成から立ち上げ、デバック、保守までをサポートします
機能一覧

| シンプルモーションユニット | ||
|---|---|---|
| FX5-80SSC-S | FX5-40SSC-S | |
| 最大制御軸数 | 8軸 | 4軸 |
| サーボアンプ接続方式 | SSCNETIII/H (150Mbps) | |
| サーボアンプ間の 最大接続距離[m] |
100 | |
| 接続サーボアンプ | MR-J4-B(-RJ), MR-J4W-B | 演算周期[ms] | 0.888, 1.777ms |
| エンジニアリング環境 | MELSOFT GX Works3(シンプルモーションユニット設定機能) | |
| 制御方式 | 位置決め制御、位置制御、速度制御、
トルク制御 アドバンスト同期制御、2軸/3軸/4軸直線補間、2軸円弧補間、軌跡制御、 速度・位置切換え制御(ABS/INC)、位置・速度切換え制御(INC) |
|
| 制御単位 | mm,inch,degree,pulse | |
| 位置決めデータ数 | 600データ(位置決めデータNo.1~600)/軸 | |
| 加減速方式 | 台形加減速、S字加減速 | |
| 手動制御 | JOG運転、手動パルサ運転、インチング運転 | |
| 制御内容を変更する機能 | 現在値変更、
目標位置変更機能 加減速時間変更機能 |
|
| 原点復帰方式 | 近点ドグ式、カウント式1、カウント式2、データセット式、スケール原点信号検出式、 ドライバ原点復帰式 ※1 |
|
| 補助機能 | 緊急停止機能、H/Wストロークリミット機能、S/Wストロークリミット機能、絶対位置システム、 アンプなし運転機能、無限長送り機能、 任意データモニタ機能 フラッシュROMバックアップ、Mコード出力機能、デジタルオシロ機能、 カム自動生成機能 |
|
| 入出力占有点数 | 8点 | |
| DC24V外部消費電流[A] | 0.25 | |
| 質量[kg] | 0.30 | |
トルク制御
巻出し、巻取りなどの張力制御にも、シンプルモーションユニットを使用することができます。
速度・トルク制御中も現在位置管理を実施しているので、位置制御に戻した後も、絶対位置座標での位置決めが可能です。

速度・トルク制御(押当て制御)
位置決め制御、速度制御だけでなく、トルク制御、押当て制御も可能です。下図のような制御モード切換え(位置制御→トルク制御→位置制御)もモーション専用デバイスにより可能です。また、トルク制御モードには、安全性を重視して停止後に切り換える「トルク制御」と、移動中に切り換える「押当て制御」があります。トルク制御、速度制御時も現在位置管理を実施しているので、位置制御に切り換えた後も、絶対位置座標での位置決めが可能です。

アドバンスト同期制御/カム制御
ライン1から移動したワークを、ロボット1を使って中継地点へ搬送します。ロボット1が元の位置へ移動後、ロボット2を使って中継地点のワークをライン2へ搬送します。ロボット1とロボット2はお互いの位置をチェックしながら移動する必要があり、タクトタイムが延びる要因になります。カム制御を使用すると、お互いの位置はカムパターンにより決まるので、効率よくワークを運ぶことができます。

目標位置変更機能
移動中(1 軸直線制御)の目標位置を任意のタイミングで変更する機能です。右図の装置例のように、次のラインへ移動中に製品の検査を行い、不良品が発生した場合は目標位置を変更して不良品入れに入れるといった変更が可能です。

任意データモニタ機能
サーボアンプ、サーボモータの情報をシンプルモーションユニット経由でモニタすることができます。お客様にて作成した画面へ表示することも可能になります。
- 指定可能データ
- 実効負荷率、回生負荷率、ピーク負荷率、負荷慣性モーメント比、位置制御ゲイン1、母線電圧、サーボモータ回転速度、位置フィードバック、絶対位置検出器1回転位置、消費電力、積算電力量など

カム自動生成機能
包装紙のシート長、ロータリーカッター軸の径、シートの同期区間に合わせてカムデータを自動で作成でき、ロータリーカッター装置のカッター軸に適用します。
カム自動生成機能を使うことにより、カムデータの作成が不要のため、設計工数を削減できます。

- ※1:ドライバ(サーボアンプ)に設定された原点復帰方式を使用します。