MELSERVO-J5シリーズ サーボアンプ 接続性
 width="1440" height="320" decoding="async">
width="1440" height="320" decoding="async">指令インタフェース
CC-Link IE TSN
CC-Link IE TSN対応のコントローラとの同期通信にて一定周期で指令を受け取り、サーボモータを駆動できます。(位置/速度/トルク)
モーションユニットやモーションソフトウェアと組み合わせて、高速と高精度の時刻一致により、軸/装置間での正確な同期動作を実現します。
CiA® 402ドライブプロファイルに対応し、プロファイルモード (位置/速度/トルク) や位置決めモード (ポイントテーブル) も可能です。
プロファイルモード対応したコントローラと組み合わせた場合、サーボアンプにて目標位置までの位置指令を生成するので、コントローラの負荷が低減します。
- [CC-Link IE TSN対応]
MR-J5-G/MR-J5W_-G/MR-J5D_-G4
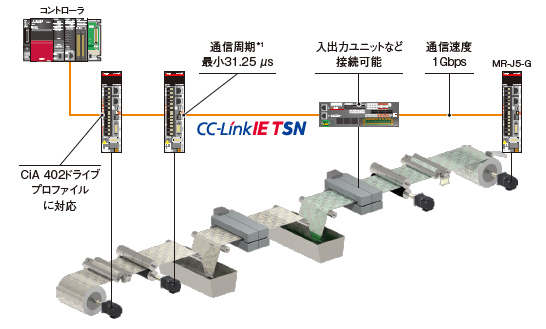
- *1.通信周期31.25 μsはMR-J5-G/MR-J5D1-G4とRD78GHの組合せの場合です。
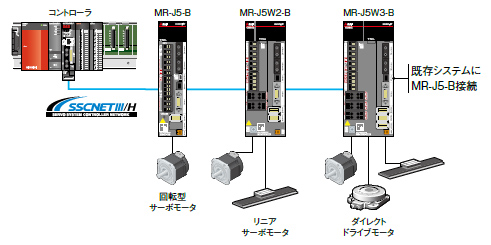
SSCNETⅢ/H
MR-J5-B/MR-J5W_-Bを使用することで、サーボシステムコントローラの既存資産を有効活用できます。
エンジニアリングソフトウェアのパラメータコンバータ機能や「MELSERVO-J4シリーズからJ5シリーズへの置換えの手引き」により、置換えをサポートします。
CC-Link IEフィールドネットワーク Basic
FX5U CPUユニットなどCC-Link IEフィールドネットワーク Basic対応マスタ局にてMR-J5-G/MR-J5D1-G4サーボアンプを制御できます。リンクデバイスを介して、サーボアンプはCANopen®デバイスとして実行します。
プロファイルモード (位置/速度/トルク)と位置決めモード (ポイントテーブル) の2つの方式に対応しています。
MR-J4-GFで構築した既存システムにMR-J5-Gサーボアンプを接続可能です。
またMR-J5-G/MR-J5D1-G4はライン接続に対応しました。*1
- *1.ライン接続未対応機器使用時は、スター・ライン接続となります。

汎用インタフェース
汎用インタフェース対応MR-J5-Aサーボアンプは、パルス列、アナログ入力などを装備。制御モードは位置、速度、トルク制御に対応し、制御モードの切換えが可能です。オープンコレクタ時は、シンク入力およびソース入力に対応しています。

EtherCAT®
EtherCAT®対応サーボアンプをラインアップ。
高性能・高機能なMR-J5サーボアンプをEtherCAT®システムにて構築可能です。
タッチプローブにも対応しています。*2 (ラッチ精度 1 μs)
[EtherCAT®対応]
MR-J5-G-N1/MR-J5-G-HSN1/MR-J5-G-RJN1/
MR-J5W_-G-N1/MR-J5D_-G4-N1
| 通信仕様 | CANopen over EtherCAT® (CoE) Ethernet over EtherCAT® (EoE) Safety over EhterCAT® (FSoE) |
|---|---|
| ドライブプロファイル | CiA® 402 |
| 通信周期 *1 | 125 μs, 250 μs, 500 μs, 1 ms, 2 ms, 4 ms, 8 ms |
| 制御モード | Cyclic synchronous position mode (csp) |
| Cyclic synchronous velocity mode (csv) | |
| Cyclic synchronous torque mode (cst) | |
| Profile position mode (pp) | |
| Profile velocity mode (pv) | |
| Profile torque mode (tq) | |
| Homing mode (hm) |

- *1最小通信周期は機種によって異なります。
- *2MR-J5-G-N1の場合、ファームウェアバージョンC0以降、かつ2021年6月以降製造のサーボアンプで使用できます。
EtherNet/IP®
MR-J5-G-N1サーボアンプはEtherNet/IP®にも対応しました。
EtherNet/IP®においても高速高精度なサーボシステムを構築可能です。
[EtherNet/IP®対応]
MR-J5-G-HSN1/MR-J5-G-RJN1/MR-J5W_-G-N1/MR-J5D_-G4-N1
| 通信仕様 | THE CIP NETWORKS LIBRARY Volume 1 Common Industrial Protocol (CIPTM) THE CIP NETWORKS LIBRARY Volume 2 EtherNet/IP® Adaptation of CIP |
|---|---|
| ドライブプロファイル | CiA® 402 |
| 通信周期 | 1 ms~100 msから選択 |
| 制御モード | Profile position mode (pp) |
| Profile velocity mode (pv) | |
| Profile torque mode (tq) | |
| Homing mode (hm) |

IP通信対応機器との接続
CC-Link IE TSNによる制御通信とTCP/IP通信による情報通信の混在ができます。
CC-Link IE TSN対応のデバイス局とIP通信対応機器を活用した、自由度の高い製造システムを構築可能です。
IP通信対応機器は、サーボアンプ、入出力ユニットの後ろに接続してください。
