特集論文

MELSEC iQ-Rシリーズ サーボシステムコントローラ
2015年11月公開【全3回】
名古屋製作所 大野宏幸 安藤友典 末松圭司
要旨
生産システムが大規模・複雑化する一方、生産にかかわるTCO(Total Cost of Ownership)削減、設備のタクトタイム短縮や稼働率の向上は、今までに増して重要になってきている。このような市場環境に応えるため、三菱電機のサーボシステムコントローラは、プラットフォームを刷新した “MELSEC iQ-Rシリーズ” に対応した。その特長を次に示す。
- (1) ユニット間バスの高速シリアル化によってデータ授受を大幅に高速化するとともに、モーション処理タイミングを同期する仕組みを導入。よりきめ細かで精度が高いモーション制御と、大規模多軸同期システムを両立した。
- (2) 処理エンジンをSoC(System on Chip)化して高速化とコスト低減を両立。SDメモリカードにも対応し、大量のレシピデータや生産情報ログによって多品種生産への対応やデータトレースを強化した。
- (3) ファンクションブロック(FB)やアドオン機能などで、アプリケーションプログラムを部品化、パッケージ化する仕組みを導入。装置立ち上げ工数削減に貢献する。
- (4) エンジニアリングソフトウェアは、シーケンサCPU用ソフトウェア “GX Works3” だけで多彩なモーション制御を設定できる機能を搭載。操作性も統一して大幅に使い勝手を向上した。
これらの機能・性能の向上によって、この製品はこれまでのサーボシステムコントローラの集大成ともいうべき製品となっている。
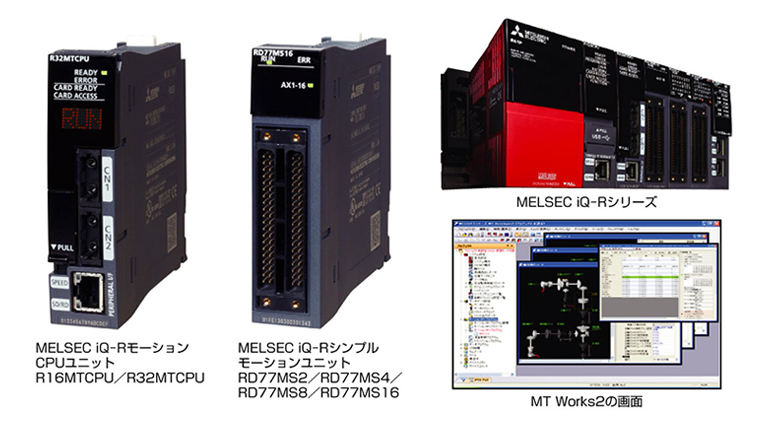
MELSEC iQ-RモーションCPUユニットとシンプルモーションユニット
当社サーボシステムコントローラは、大別してモーションCPUユニットとシンプルモーションユニットの2種類がある。MELSEC iQ-Rシリーズでは高速バスに対応し、新開発の高速SoCによって従来の “MELSEC Qシリーズ” よりも1.8倍から4倍の高速化を実現し、MELSEC Qシリーズとインタフェースを共通化しつつ高機能化した。 “MELSERVO J4シリーズ” やGX Works3、MT Works2との組合せで生産性向上の最大化ソリューションを提供する。
1. まえがき
当社のサーボシステムコントローラは、MELSEC Qシリーズ(以下 “Qシリーズ” という。)でのマルチCPUシステムによる分散制御(2000年)、“iQ Platform” でのCPU間通信高速化(2007年)、位置決め機能と同期制御のシームレス化(2010年)、ACサーボMELSERVO J4シリーズ対応(2012年)などによって進化を続けてきた。
また、大規模システム向けのモーションCPUユニットと中~小規模システム向けのシンプルモーションユニットの2種類のコントローラをラインアップし、それぞれの特長を持って発展してきた(図1)。

図1.サーボシステムコントローラの種類と用途
モーションCPUユニットはシーケンサCPUユニットと組み合わせた当社独自のマルチCPUシステムを構成しており、モーション制御とシーケンス制御を各CPUユニットに負荷分散させることで、安定したシーケンス制御と高精度かつ高応答のモーション制御を両立させている。さらに、ユーザーはソフトウェアのバージョンアップによって新たに追加された新機能を利用できる。
また、シンプルモーションユニットは、シーケンサCPUユニットで直接制御できる位置決めユニットの使いやすさをそのまま継承しつつ、同期制御や速度・トルク制御を可能としたことによって高機能化した。高度なモーション制御を手軽に実現できる点で市場から高い評価を得ている。
このような2種類の製品構成によって、市場の様々な要求に応えてきたが、近年の装置制御の高度化・装置開発期間の短期化によって、次に示す市場の要求も顕在化している。
- (1) モーション演算処理の更なる高応答化の実現、及び制御データの複雑化・大容量化への対応
- (2) シーケンサCPUユニットとの協調制御のためのデータ交換のレイテンシ低減とスループット向上
- (3) 制御内容(アプリケーションプログラム)の標準化・パッケージ化
- (4) 実機やパソコンがない環境でのデバッグ容易性向上
これらの課題に取り組むため、MELSEC iQ-Rシリーズでは新開発のSoCの搭載、高速システムバスやSDメモリカードへの対応、ファンクションブロック(FB)やアドオン機能によるアプリケーション標準化の仕組みを構築した。さらにエンジニアリングソフトウェアではシミュレーション機能やデータトレース機能を充実化した。
本稿ではそれぞれの概要及び特長について述べる。
- 要旨 MELSEC iQ-Rシリーズサーボシステムコントローラ
- 第1回 ハードウェア
- 第2回 ソフトウェア
- 第3回 エンジニアリングソフトウェア
参考文献
この記事をシェアする