2017年 月レースに挑む
HAKUTO「世界最小の惑星探査ローバー」
2017年、史上初の月面レースで、月の砂レゴリスを巻き上げ、世界の月ローバー(月面車)が月を駈ける。しかも国家プロジェクトでなく、民間の手によって作られた手作り感満載のローバーたちというのが画期的で楽しい。優勝候補筆頭が日本のチーム、HAKUTOだ。DSPACEはHAKUTOにかねてから注目し、2014年12月には浜松市の中田島砂丘で行われた走行試験も追っかけ取材を行った。(参照:狙え、優勝!日本の「ハクト」が月面レースに挑む理由)。
砂丘で障害物を乗り越えながら走るローバーを興奮して眺めながら、「ほんとに実現できるの?」と私は内心思っていた。その理由は資金。当時開発されていたHAKUTOの月面ローバー(ムーンレイカー)は8kg。月に物資を運んでもらう輸送費は1kg当たり1.2億円かかるため、10億円近くかかると聞いたからだ。HAKUTO代表の袴田武史さんは、過去に預金残高が1万円を切るどん底の時期を乗り越えて、KDDIやJAL、IHIなど次々に大手企業からの資金調達に成功。そして実際に月を走る月面車のフライトモデルが8月29日、堂々と発表されたのだ。

フライトモデルはシンプルで洗練されたデザイン。以前のなんとなく手作り感の残る愛嬌ある月面車に比べると「かっこいい!」のだが、まず驚いたのがその重さ。なんと4Kg。2014年から約半分まで減量している。実はここに至るまでに、袴田さんたちビジネスチームと、開発を行うエンジニアチームとの間に激しい議論の応酬があったという。
「月面車を月に運ぶには1kg=1.2億円かかるので、ビジネスチームとしては軽ければ軽いほど、資金が調達しやすくなります。一方、エンジニアチームは月で確実に走る車を作りたいから重くなる。月面ローバーの開発は軽量化との闘い。つまりコスト×パフォーマンスのせめぎあいなのです」(袴田さん)。
どうしても月面にローバーを送りたかった袴田さんがチームに提案したのは、下の写真左側の2輪車「テトリス」。重量2.5kgで軽いから資金調達も現実的であり、確実に月面に送ることができる。(実は私もテトリスファン。欲を言えば写真のように親子2台で行ってほしかった)。しかし2輪はどうしても走行性能が落ちる。そこで、エンジニアチームは、4輪でどこまで軽量化できるか、「極限の軽さ」への挑戦を始めたのだ。

軽量化の鍵―世界最小の惑星探査ローバー
軽量化のカギとなったのは素材だ。宇宙機でよく使われるアルミを使っていたがより軽い素材である炭素強化繊維(CFRP)やウルテムに変えた。これらはボーイング787や米民間ロケット・ファルコン9に使われている素材だ。素材を変えることで、アルミが占めていた30%分の重量を5%まで削減できた。軽くなってもロケット打ち上げ時の振動14Gに耐えることは実験で実証済みだ。次に注目してほしいのが車輪。月面の柔らかいパウダー状の砂レゴリスを走れるように車輪一つに23枚あった刃を15枚に。1枚当たり3グラムの減量だからトータル約100グラム≒1000万円のコスト削減・・というようにグラム単位の減量の結果、4Kgの機体を実現した。
「NASAの火星ローバー・キュリオシティは900キログラム、中国の月面車YUTU(玉兎)は120kg、月レースに参戦するライバルのアストロボティック社のローバーは30kg。これらの10分の一から100分の一で、『世界最小の惑星探査ローバー』です」と袴田代表は胸を張る。
軽くても高性能に
「軽く小型化して一番大変なのは熱設計です」と最高技術責任者である東北大学の吉田和哉教授は指摘する。月面の昼と夜の温度差は250度にも及ぶ激しさ。「機体が小さいと熱を逃がすなど熱をコントロールする面積が小さく、もろに太陽光の影響を受けて電子機器がオーバーヒートして動かなくなる」(袴田さん)。そのため、表面積を大きくしたり、ボディ外面を銀テフロンにして熱を反射させたりなど様々な工夫がなされている。熱設計担当者は仕事のことが夢にまで出てきて、毎晩うなされていたそうだ。
通信について、オフィシャルスポンサーKDDIが技術協力を行っているのも注目だ。吉田教授が期待するのは移動体通信技術。「月面でローバーが移動しながら途切れずに通信をするのは、簡単ではない。地上では多数の基地局が整備されているが、月面では通信の中継拠点となるのは着陸機一つしかありません。地上の携帯電話で実際に移動体通信を行っている、民間の通信技術に期待しています」。HAKUTOローバーにはより遠くまで通信可能な帯域と、高速通信可能な帯域の二本のアンテナによる「ハイブリッド通信システム」を搭載。月面でも途切れない通信で、地上に映像を送ってくれるだろう。
レースの時期を決めるのは?月の縦穴の探査は?
月面レースは正式には「Google Lunar X Prize(グーグル・ルナ・エックスプライズ)」と呼ばれ、次の3つをクリアすることが条件となっている。
- 1. 民間のロケット・着陸機で月面に民間月面車を運ぶこと
- 2. 月着陸地点から500m以上移動すること
- 3. 高解像度の月の動画や静止画を地球に送信すること
これらを最も早く達成したチームには賞金2000万ドル(約20億円)が授与される。
現在、HAKUTOローバーはアメリカのアストロボティック社が開発する着陸機「ペレグリン(Peregrine)」に乗せてもらい、スペースX社のファルコンロケットあるいはそれに代わる民間ロケットで打ち上げられる予定だ。ペレグリンにはアストロボティック社のローバーやチリ、ハンガリーのローバーも相乗り予定。月着陸後、一斉に並んで「よーい、どん!」する様子が見られるだろう。極限の軽さを実現したHAKUTOローバーの軽やかな走りが見ものだ。

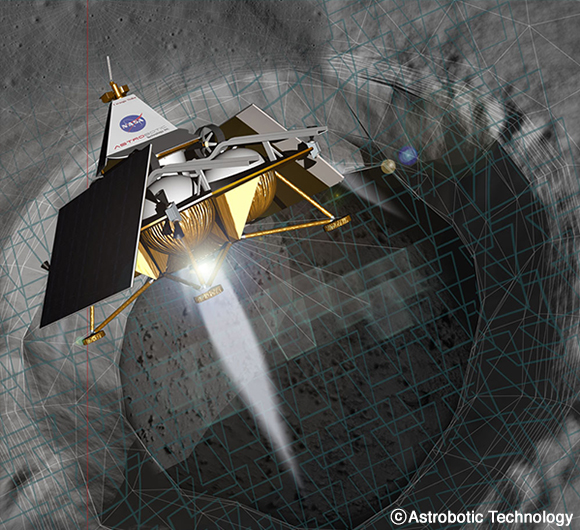
(提供:Astrobotic Technology)
気になるのが、「いつ打ち上げられるの?」という点。その時期を左右するのは「着陸機(アストロボティック社のペレグリン)の開発でしょう」と吉田教授。月面まで飛行し、狙った場所に降りる技術は非常に難易度が高く、着陸機の開発が完了しないと飛び立つことはできない。
そして私が期待するのは、着陸地。現在ターゲットになっているのは「LACUS MORTIS(死の湖)」。ここは月の縦穴が発見された場所としても注目の場所。広大な地下空間があるかもしれないが、その内部がどうなっているかまだどこも探査していない。「月レースのミッションが終わった後に、HAKUTOのローバーでできるだけ深部に迫りたいと思っています」(吉田教授)。一番小さな「テトリス」ローバーが探査する可能性もまだ生きているという。


HAKUTOは9月末に鳥取砂丘で走行実験を行い、フライトモデルの製作に入る。2017年月面レースはすでにカウントダウンに入り、HAKUTO応援の輪は広がっている。「宇宙は自分と関係ない、でなく普通の人が当たり前に『宇宙で何をしよう』と考えるようにしたい」と袴田さん。小さなローバーが宇宙を思いっきり引き寄せてくれそう。月にいる自分を思い浮かべながら応援しましょう。