有人与圧ローバーが月面天文台を建設!? &月着陸機SLIMの成功要因を未来へ—宇科連レポート①
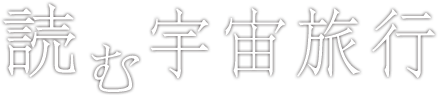
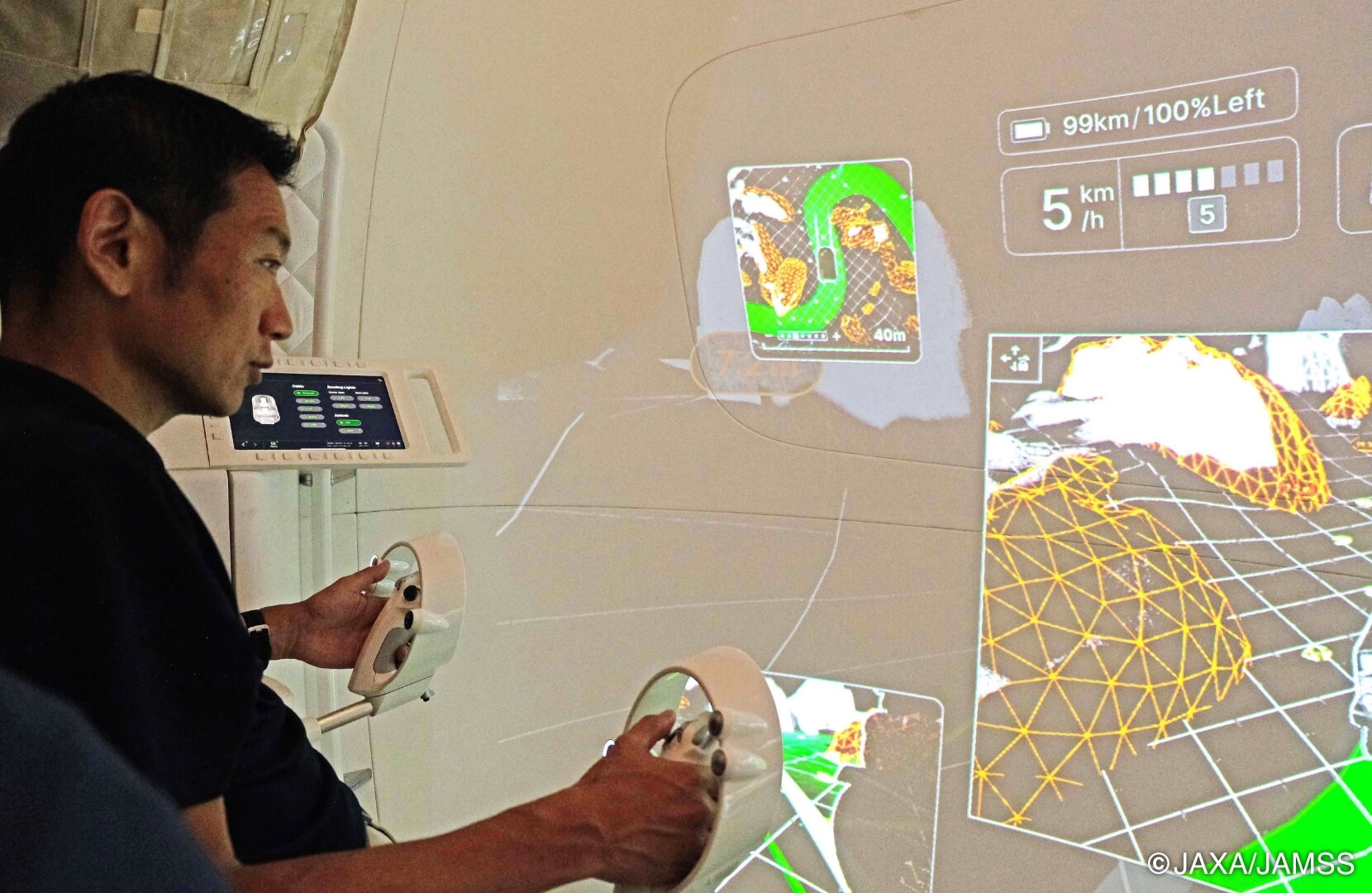
兵庫県姫路市で行われた第68回宇宙科学技術連合講演会(以下、宇科連)は約2400人が参加、大盛況だった。11月5日、会場に入ると、人だかりができていたのはJAXAの展示ブース。2032年にも月面に運ばれる予定の「有人与圧ローバー」の模擬操縦体験が行われていたのだ。これは実際に有人与圧ローバーの開発で使われているものだという。

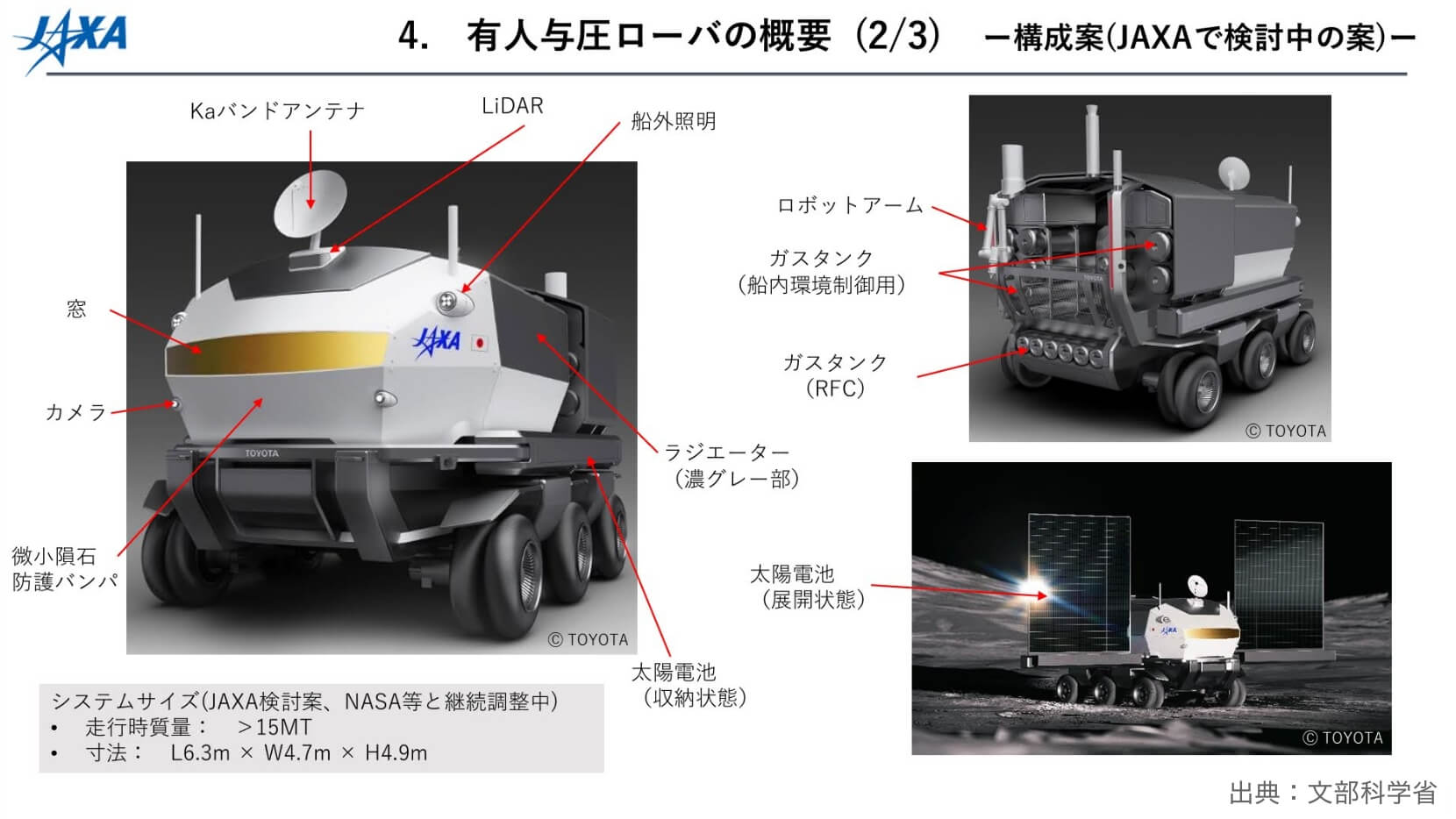
さっそく列に並び、操縦させて頂く。操作はハンドルはなくジョイスティックでとても簡単。右や左に曲がるときも、加速減速もボタンを指で押すだけ。スクリーン上に模擬月面が広がり、目的地までの経路がグリーンで表示されている。その経路に沿うように両端にある岩をよけながら操縦すると、自分が進む経路はグレーのラインで表示される。操縦速度は時速15kmがマックスだが、最初は時速5kmぐらいから始めるようにアドバイスされる。
調子に乗って速度をあげると、すぐに岩に乗り上げてしまう。すると画面の車体が傾く臨場感が!「タイヤの画面を見ると、岩に乗り上げてますよね」とJAXA解説員さんが教えてくれる。
スクリーン上には4つの小窓があり、右タイヤ、左タイヤ近くの路面状況、車全体を上から撮影した映像、車の後ろの路面状況が映し出されているのが楽しい。大きな岩までの距離も数字が出るので、備えることができる。「これから岩場ゾーンに入ります」と言われ、緊張するもゆっくり進むことで目的地にたどり着いた。
体験後、JAXA有人与圧ローバーエンジニアリングセンターの神吉誠志さんにお話を伺った。経路近くに大きな岩が出てきたが、これは実際の月面を模擬しているのだろうか?
「月面に(現時点で)これだけ詳細な地図はありません。せいぜい10~40mの精度しかない。でもどれくらいの大きさの岩がどの程度の数、分布しているのかというデータはあるので、その情報をもとにランダムに岩を置いています」とのこと。
神吉さんによれば、現在の走行モードは「宇宙飛行士によるマニュアル運転モード」「地球からの遠隔操作モード」「自動走行モード」の3種類を考えている。「自動走行では現地点から目標地点を指定すると、ローバーが最適ルートを自分で考えながら走ります」。目印もGPSも(当面は)ない月面で自動走行させるとは! 技術的にも難しそうだ。
開発で難しい点を伺った。「月面に行ったことがある人が少ないので、データが少ないんですね。月の砂レゴレスはふかふかの砂漠みたいな感じと言われているが、実際にそこで走った時に、どれくらいタイヤが滑るのかも正確にはわからない。レゴリスのサンプルデータ等をもとに、予測しながら開発をしないといけない点です。
また、温度も(昼と夜で)数百度の温度差があるのですが、ローバーの中にいる宇宙飛行士はシャツ姿で生活できるように温度制御しないといけない。さらにエネルギー源としてガソリンが使えるわけでなく、太陽電池パネルで充電をしないといけないのですが、開いたまま走ると壊れてしまう。畳んだり開いたりする技術も必要です」
むずかしい点を話し出すと止まらない神吉さん。
「月面は夜が長いんですよ。赤道や低緯度域では14日間、南極域の日照条件のよいところでも8日間は夜が続き、その間ずっと発電ができなくなってしまいます。いかにエネルギーをうまく蓄えて使うか。そのためには再生型燃料電池の技術が必要です」
今まで宇宙飛行士が乗る月面車としては、アポロ計画で使われた宇宙服を着て乗る曝露ローバーはあったが、シャツ姿で乗ることができる「有人与圧ローバー」は世界で初めて。しかも10年間運用し、走行距離1万kmを目指すという(アポロ計画の月面車は3台で100km満たなかった)。
「アルテミス7」で打ち上げを目指す有人与圧ローバーは現在、概念設計フェーズであり、どういうローバーにするかシステムデザインをしている段階だ。それが終わると、エンジニアリングモデル、つまり物づくりが始まるという。
打ち上げについて、NASAの2024年11月19日付のリリースによると「2032年以降、スターシップの貨物着陸船でJAXAが開発する有人与圧ローバーを運ぶ」と発表されている。
有人与圧ローバーが科学ミッションで活躍
11月7日、宇科連でJAXA 神吉さんらによる有人与圧ローバーの発表があった。興味深かったのは、「有人与圧ローバーを使って月面で何をするか」という点。日本は月面で3つの科学を行うことを計画中だ。具体的には、月面の裏側に月面天文台を設置して、宇宙誕生直後の「暗黒時代」から出される電波(中性水素)などを観測しようというもの、「月震計ネットワーク」を作り月の内部構造を調べるもの、また月からサンプルを地球に持ち帰る「サンプルリターン」によって太陽系形成過程などを調べようという3本柱だ。
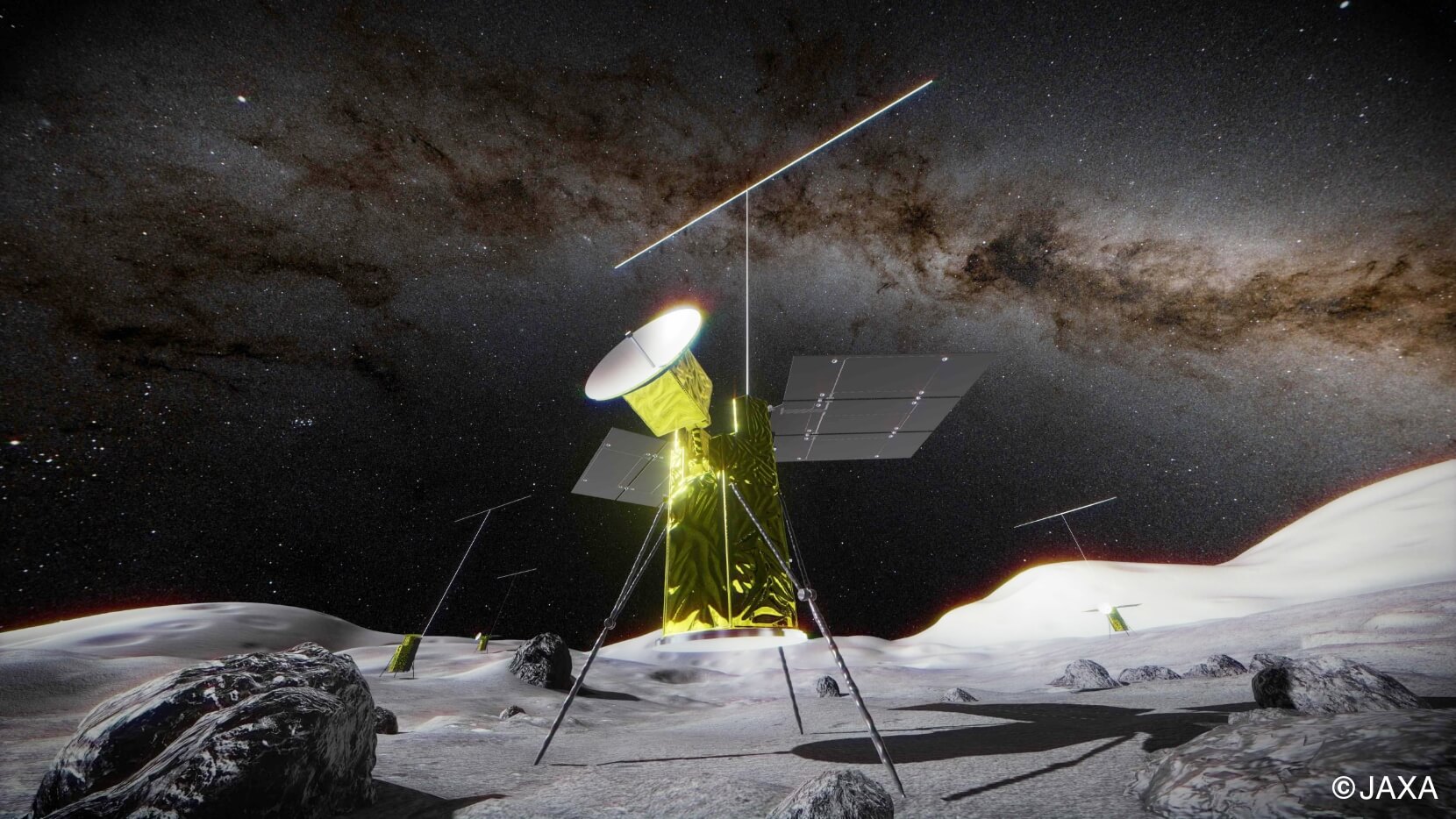
たとえば月面天文台は、地球からの電波に邪魔されない月の裏側に設置する必要がある。天文台といっても大掛かりなものではなく、約5mのアンテナをもった比較的簡易なもので、将来的に約10基を月面に設置することが検討されている。
実際に、有人与圧ローバーで天文台の設置が可能なのか、JAXAでは検討を行っている。 人がいることのメリットは組み立て作業や機器のチューニング、修理などを行えること。だが1年間のうち、有人でローバーに乗る期間は約1か月。残り11か月は無人での運用になる。最大越夜時間は有人で36時間、無人で192時間。
「同じ場所でも時間が経過すると(太陽高度などにより)日向になったり日陰になったりするので、できるだけ日向になるタイミングで移動する必要がある。天文台建設の場合には、できるだけ日照条件のよいクレーターのエッジ(端の部分)を通りながら走行する」(JAXA 神吉さん)
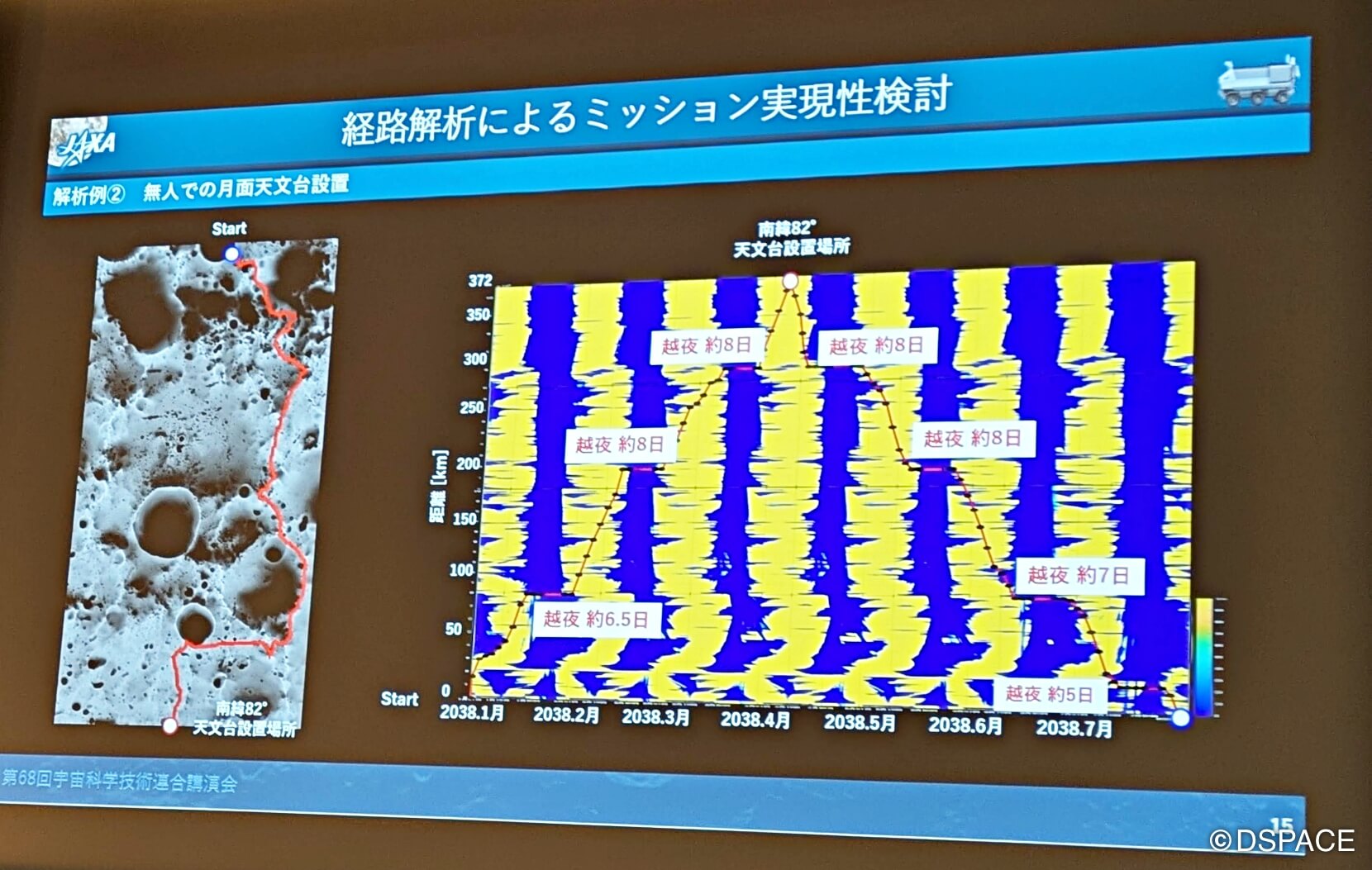
天文台を建設する際の経路を検討したシミュレーション結果が示された。月の裏側の月面天文台までの距離は約372km。「有人与圧ローバーは無人で3か月かけて設置場所まで行って、3か月かけて戻ってくることになる。その間6回の夜を迎えますが、解析の結果、最大越夜期間は8日間で越夜能力192時間という条件内に収まり、実現可能」とのこと。
ちなみにローバーは1日8時間移動した後、残りの16時間は停車して太陽電池パネルを展開、バッテリの充電と水電解による再生型燃料電池の充電を行う。
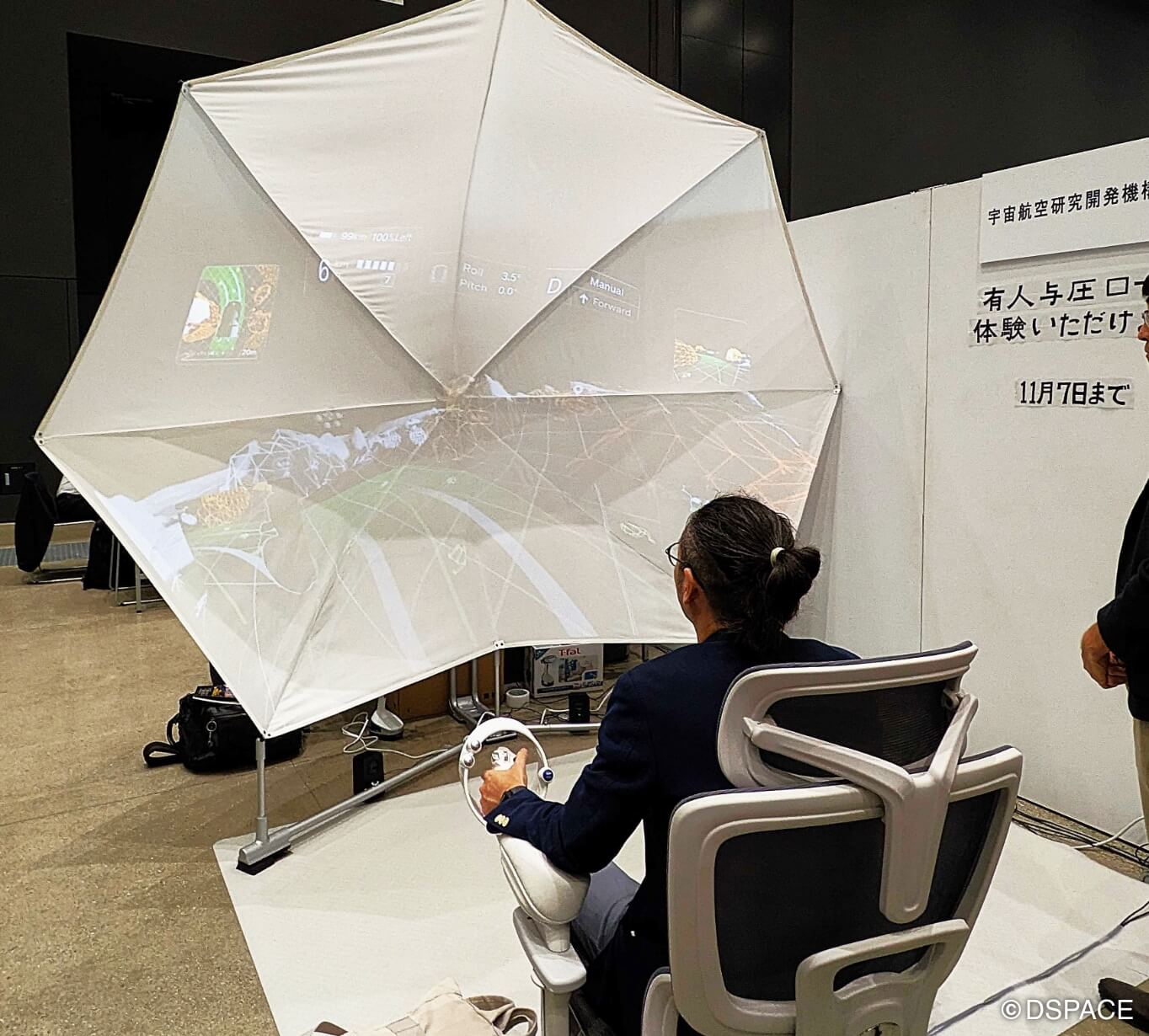
月面天文台の設置について、宇宙飛行士はスタート地点(月面の南極域)でセッティングを行い、ちゃんと動くか状態を確認したうえでローバーに搭載する。その後有人与圧ローバーが無人で目的地に行き、ロボットアームなどを使って設置するというシナリオだ。
天文台建設が無人で行われるのはなぜか。「天文台の建設場所には片道3か月、往復6か月かかる。人が乗るにはその分の水や食料を積む必要があり、ローバーを大きくしなければならなくなる」(神吉さん)。どうしても宇宙飛行士が行く必要があれば、月面の裏側の天文台設置場所に直接宇宙飛行士を(宇宙船などで)飛ばすことを考えた方がいいそうだ。「有人与圧ローバーだけで何もかもやろうとするのではなく、有人与圧ローバー、無人ローバー、無人着陸機など、それぞれの宇宙機の特徴を活かしたミッションを行うことが重要ですし、これらが連携することで更に高い価値のミッションができることもあります」。
有人でのサンプルリターンや月震計設置の経路解析も行われている。最初の地点でサンプルをとり、スタート地点に帰ってくるまで2週間。食料などを補給し宇宙飛行士が交代、32時間の越夜を経て再出発。少し遠い距離(約5km)まで移動してサンプル採取、スタート地点に戻ってくるのに約2週間という探査が実現できることがわかった。
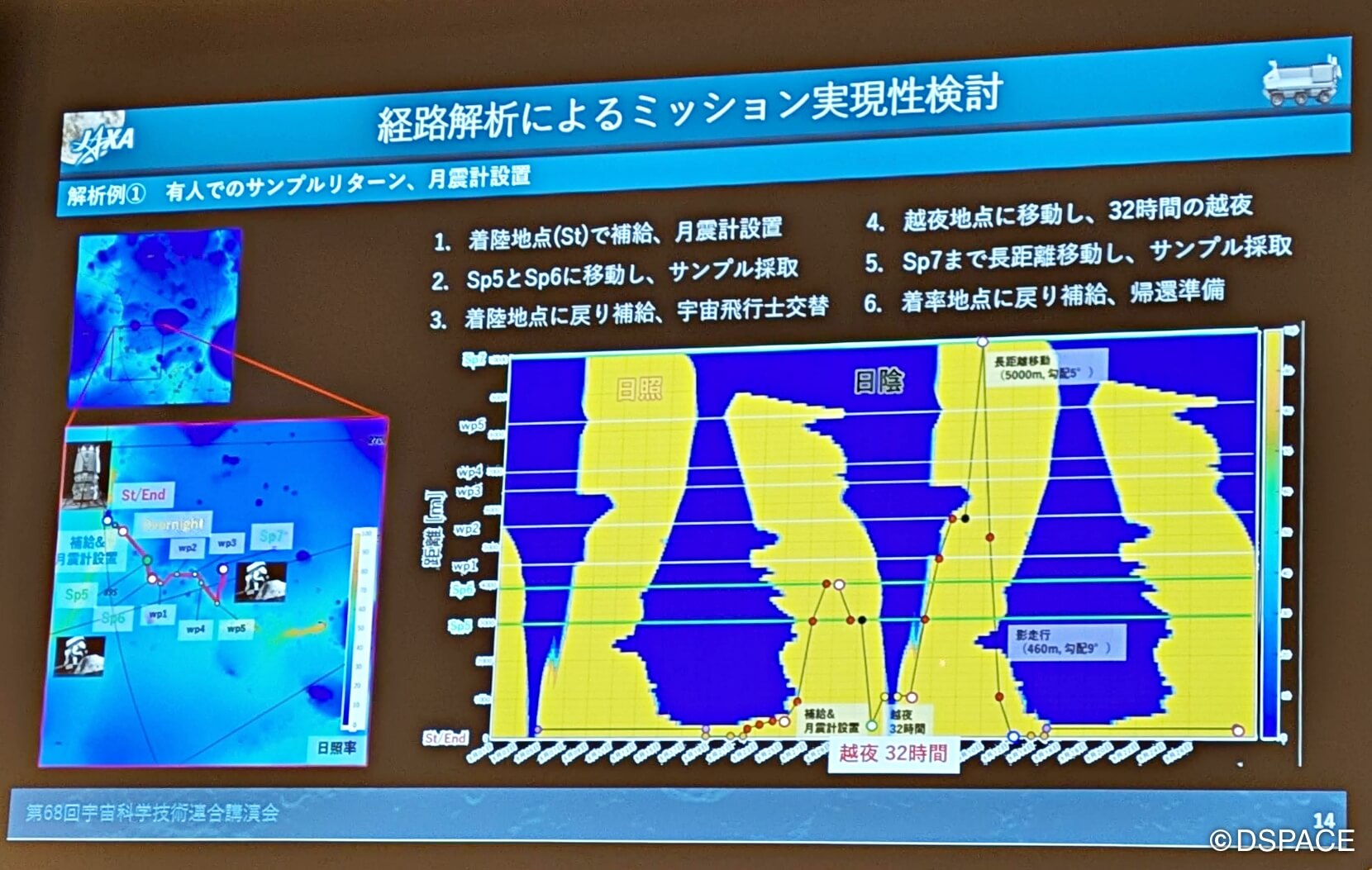
ちなみに宇宙飛行士が有人与圧ローバーに乗って着陸機から遠く離れる場合は、緊急時に備えて、曝露ローバーが一緒に移動することになっている。宇宙飛行士2人の月面での船外活動時間は、一週あたり最大24時間(週3回)が想定されている。日本人宇宙飛行士が有人与圧ローバーを操縦し、月面を駆けまわる日が楽しみでならない。
SLIM成功の秘訣―組織の壁を越えたワンチーム

今年初めのSLIMによるピンポイント月着陸成功で日本の月面探査・着陸技術は世界から大きく注目されている。今後は月の極域で水氷の「質や量」を調べる月極域探査機LUPEX、有人与圧ローバーなどで人類の月面探査をリードしていくことが期待される。
学会では、SLIMがなぜ成功できたのか、その要因を未来に繋げようという発表が興味深かった。
JAXA 澤井秀次郎さんは立ち上げからの20年を振り返った。SLIMの源流は2003年。小惑星探査機はやぶさ打ち上げ前のこと。「次に何やろうか」という工学者の議論がきっかけだった。「重力天体へのピンポイント着陸」と「小型化」の二つにフォーカス。「譲れない二つの技術はぶれないように注意したこと、なるべく多くの研究者に検討に入ってもらう努力をしたことが、長い提案生活を乗り切れた要因」と分析する。限界に挑戦するような問題設定に対して、研究者が自由な発想で乗り越えようとする過程を楽しませて頂いたと語る。
もう一つが「JAXA・大学・メーカーが組織の垣根を超えてゴールを目指したこと」だ。SLIMはプロジェクト化が決定した後も打ち上げロケットの変更、斜面への着陸決定など変更が相次ぎ、探査機の形も変遷をたどった。最終的に行きついたのが今の形。斬新な着陸脚、左右非対称の形状、あえて倒れこむような二段階着陸。なにもかもが常識はずれと言っていい。
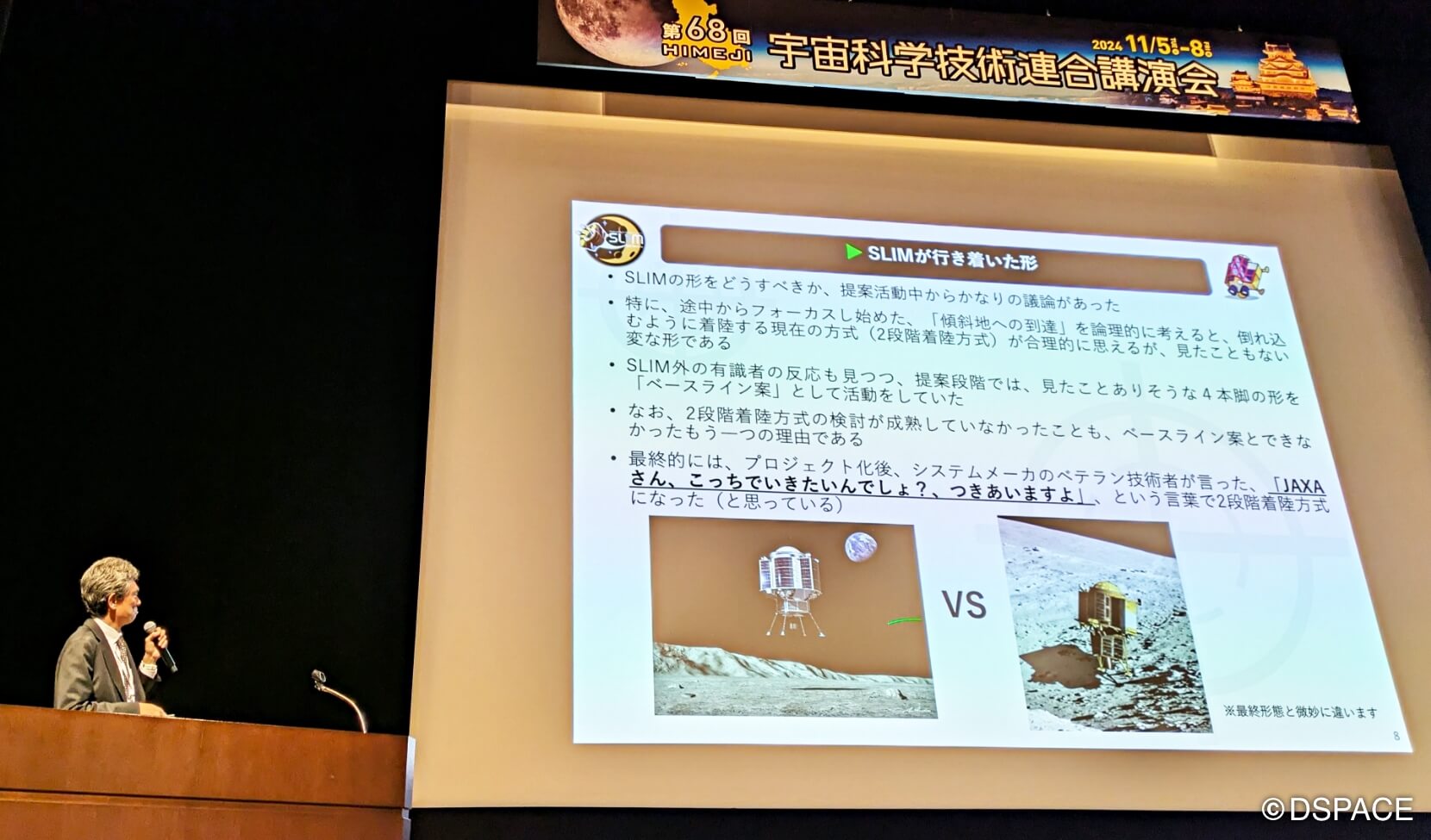
澤井さんらJAXA担当者も、現在のSLIMの形に決めるには迷いがあった。斜面に着陸するには2段階着陸が合理的だが、経験がなく従来の4本足をベースとしていた。決め手はシステムメーカー・三菱電機のベテラン技術者からの言葉。「JAXAさん、こっちでいきたいんでしょ? つきあいますよ」で2段階着陸方式になった(と澤井氏は思っているそう)。
当時、三菱電機SLIMプロジェクトマネージャだった下地治彦氏(現在は広島工業大学教授)も「SLIMはほとんどの機器が新規開発。開発の途中で設計変更があり、次々と課題が発生したが、課題を克服していく楽しさがあった。費用の点では苦しいものがあったがJAXAさん、メーカーらがワンチームとなり、前例や固定観念にとらわれず開発を進めることができた」とふりかえる。
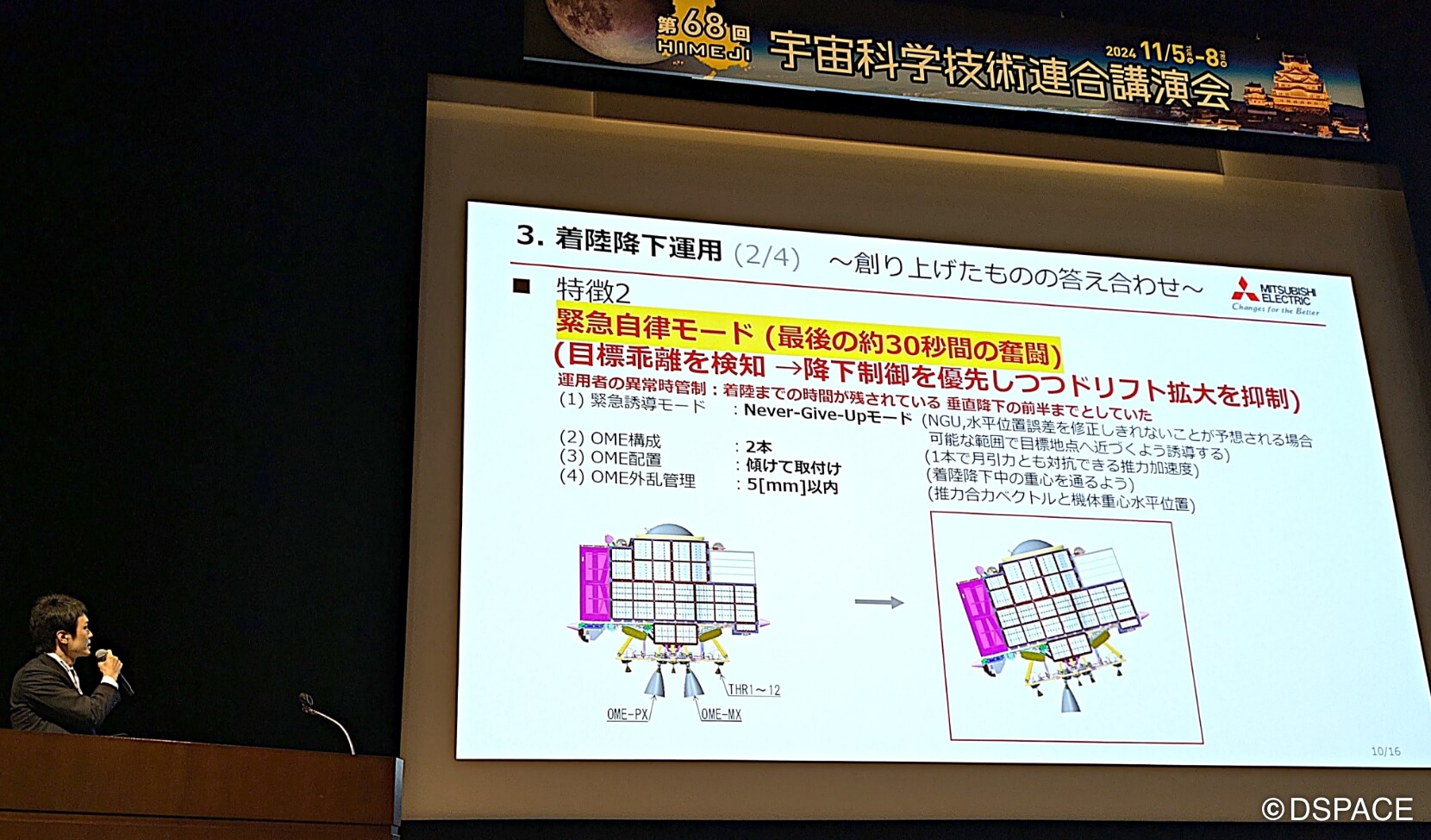
技術のポイントは三菱電機のエンジニア、芝崎裕介氏から説明があった。着陸直前の20分が注目されがちだが、打ち上げ後4か月半を経て、着陸降下スタート地点にどれだけ正確にたどり着けるかが非常に重要だった点、着陸降下時、高度約50m地点で2本あるメインスラスタ―が1本になる事象が発生した際、SLIMが自分で検知し「ネバーギブアップモード(緊急誘導モード)」を実行、目標地点から約55mの地点に無事に着陸ができた点など。
さらに着陸降下中、SLIMの太陽電池パネルが太陽の方向を向くように時々姿勢を傾けていた。それらが功を奏し着陸時のバッテリ残量が77%あり、重要なデータを取得することができたのだと。
芝崎氏は、着陸降下時のSLIM管制室の様子を予稿集にこう記している。「管制室の運用者全員と、SLIMが一体となって飛行しているような、ある種の特別な感覚があり、間違いなく成功すると確信したことを覚えている」。
ワンチームで進めたSLIM開発。澤井氏が語った「リスペクト」ということばが印象的だった。「開発の途中、うまくいかないことがいっぱいある。それに対して全力を尽くして失敗したメーカーさん、大学関係者の責任を問うのは違う。リスペクトする必要がある」
そしてこう締めくくった。「すべての最新技術は未来において陳腐化する運命にあります。近い将来、技術実証機としてのSLIMが忘れ去られるほど技術が進むことが最大の狙いです」。SLIMの技術を継承しつつ、次へ。エンジニアたちの挑戦と奮闘は続く。
- ※
本文中における会社名、商品名は、各社の商標または登録商標です。