
![]()

![]()

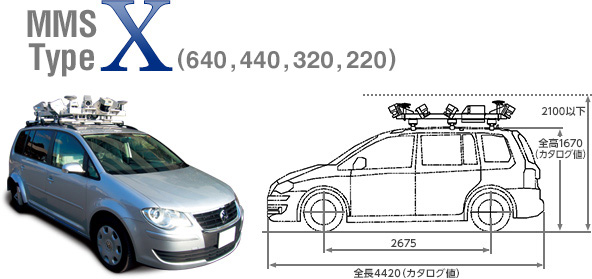
| 項目 | MMS-X (640、440、 320、220) |
MMS-X320R | MMS-K320 | |
|---|---|---|---|---|
| カメラ | 搭載台数 | 6、4、3、2台 (選択仕様) |
3台 | 3台 |
| 画素数 | 500万画素 | |||
| 視野角 | 1台あたり 水平方向80° 垂直方向64° | |||
| 設定方向 | CH1:前左向き CH2:前右向き CH3:横左向き CH4:横右向き CH5:後左向き CH6:後右向き |
CH1:前左向き CH2:前右向き CH3:横左向き |
||
| 最速撮影 枚数 |
1台あたり10枚/秒 | |||
| レーザー スキャナー |
搭載台数 | 標準レーザー2、4台 (選択仕様) |
標準レーザー2台 長距離・ 高密度レーザー (RIEGL VQ250)1台 |
標準レーザー2台 |
| 設定方向 (設定角度) |
CH1:前下(-25°) CH2:前上(25°) CH3:後上(45°) CH4:後下(-45°) |
CH1:前下(-25°) CH2:前上(25°) |
CH1:前下(-25°) CH2:前上(25°) |
|
| 反射輝度 | 取得可能 | 取得可能 | 取得可能 | |
| 取得点数 | 27,100点/秒 (1台) |
標準:27,100点/秒 (1台) 長距離・高密度: 30万点/秒 |
27,100点/秒 (1台) |
|
| 最大到達 距離 |
65m | 標準:65m 長距離・高密度:200m (500m) |
65m | |
| 視野角 | 180° | 標準:180° 長距離・高密度:360° |
180° | |
| 連続記録容量 | データログ | 最大8時間 | ||
| カメラ画像 | 最大90,000枚/台 | |||
| 絶対精度※1、3 | 標準レーザー:7m地点で10cm(rms)以内 長距離・高密度レーザー:80m地点で10cm(rms)以内※4、5 |
|||
| 相対精度※2、3 | 標準レーザー:1cm(rms)以内、長距離・高密度レーザー:10cm(rms)以内※4、5 | |||
| 自己位置精度※3 | 6cm(rms)以内 | |||
| 消費電力 | 12V DC 900W以下※6 | 12V DC 650W以下 | 12V DC 450W以下 | |
| 対応車種※7 | トヨタ ヴァンガード (320、220) フォルクスワーゲン Golf Touran |
トヨタ ヴァンガード フォルクスワーゲン Golf Touran |
スズキ ワゴンR※8、 トヨタ カローラルミオン※9等 |
|
※1:絶対精度:移動体計測による座標取得の正確度(Accuracy)
※2:相対精度:移動体測量による座標取得の安定度(Precision)
※3:良好なGPS受信環境を前提。rms:root mean square(二乗平均平方根)
※4:平面上の路面を等速度(約40km/h)で走行した場合。
※5:お客様による計測毎のキャリブレーションが必要です。
※6:最大搭載時の消費電力
※7:車両はお客様からのご支給を前提としております。
※8:軽自動車への搭載には、車両の補強が必要です。
※9:車両搭載可能重量が60kg以上の普通乗用車は車両の補強は不要です。
●引用された会社名および製品名は各社の商標または登録商標です。
●本仕様は変更になることがあります。
| ▲ ページトップに戻る|