「変幻自在なAIロボット」が作る月面基地—人間の役割は?
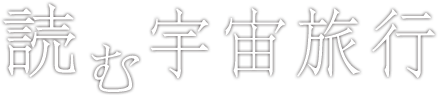
人類は月面に再び戻り、拠点を作ろうとしている。だが21世紀の月面都市の建設現場は地球上のそれとは異なるはずだ。現場で建設を進めるのはロボットたち。人間の姿は見えない。
月面は過酷な環境だ。放射線は降り注ぐし、昼と夜の温度差が激しい。作業の上では月の砂レゴリスがまたやっかいだ。車輪に絡みつきスタックする可能性があるし、宇宙服につくと払うのが大変で、うっかり吸い込むと健康被害を引き起こす可能性もある(アポロ17号の宇宙飛行士は花粉症のような症状で苦労した)。
「変幻自在なAIロボットによって月面に未来都市を実現する」と言うのは、東北大学の吉田和哉教授。長く宇宙や地上で使えるロボットを開発してきた宇宙ロボットの第一人者だ。内閣府のムーンショット型研究開発事業・目標3「月面探査/拠点構築のための自己再生型AIロボット」のプロジェクトマネージャを務める。ロボットによる月面都市実現の目標は2050年。
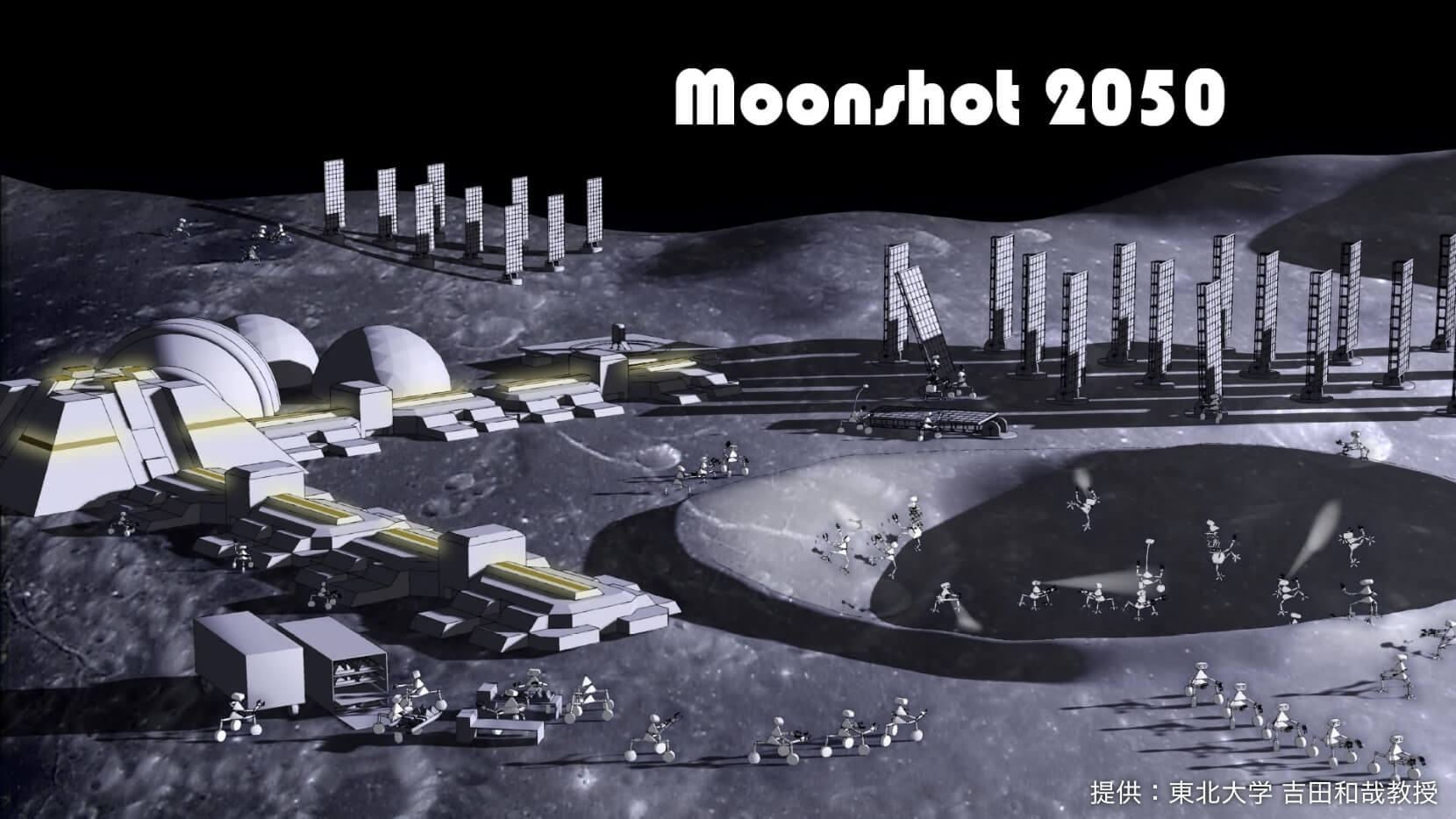
ロボットだけで月面都市が作れるのか? 3月12日、JAXA宇宙科学研究所の宇宙探査フィールドでロボットによるデモが記者公開された。その内容から紹介する。
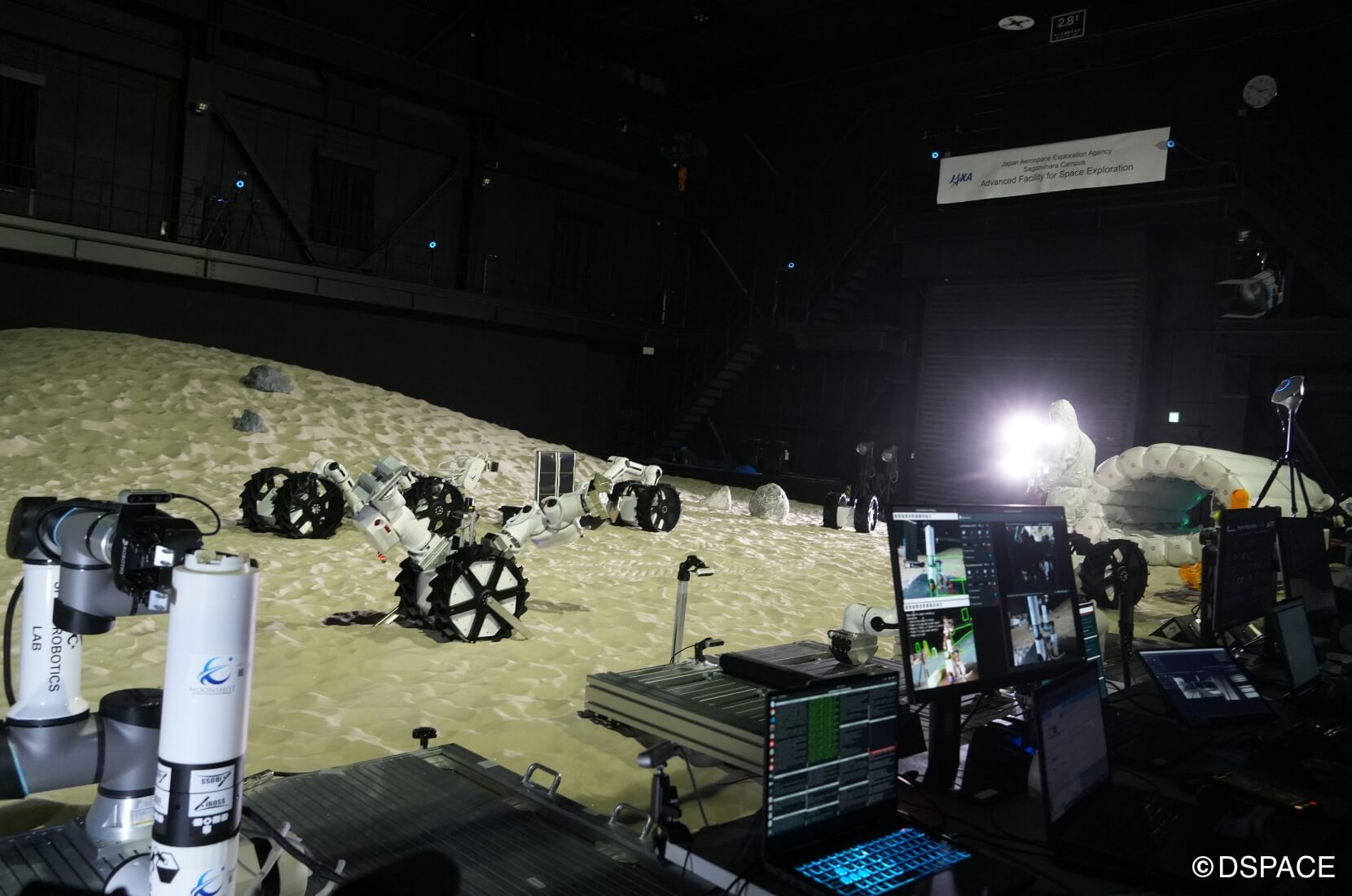
吉田教授によると、「特徴は完成されたロボットを送るのではなく、モジュール単位で月面に輸送すること。そしてロボット自身が組み立てを行うこと」。月面への輸送機会は限られ、コストもかかる。一方、月面に有人拠点を築くには様々な種類の仕事をこなさなければならない。そして月面は厳しい環境である。これらの課題を解決するために吉田教授たちが進めるのが変幻自在なAIロボット、MoonBotだ。

モジュールで運ぶから、用途によって違う形に変形できる。作業をするのは腕。移動は車輪。何を運ぶのか、どんな作業をするかによって、腕の先にとりつけるドリルやマニピュレーターなどの組み合わせを変える。故障したらパーツを取り替えることもできる。また古くなったら新しいものにバージョンアップすることも可能。そしてこれらのロボットはAIを塔載、機械学習によってどんどん賢くなるのも特徴だ。
実際に様々な作業の様子を見せて頂いた。まずはロボットが伸展型の太陽発電タワーを運搬し、伸展マストを展開する場面。JAXAの宇宙探査フィールドは月面の極域を想定し、太陽光が地平線近くの低い高度から差し込む。斜面をロボットはゆっくりと上り、目的地に着くとマストを展開する。展開がうまく進んでいるか、カメラでモニタリングも行う。

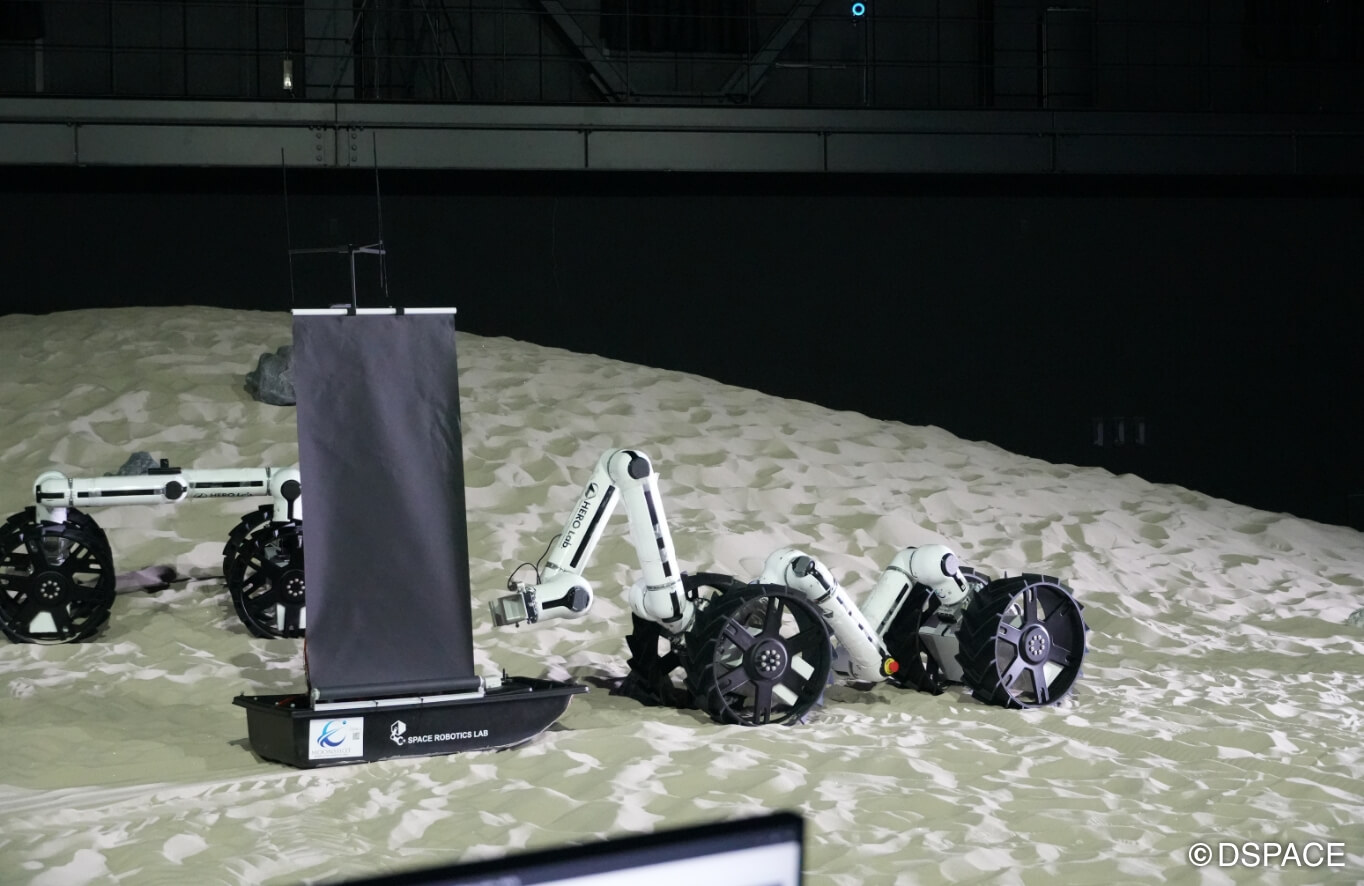
膨張型居住モジュールの展開をモニター、助け合うロボット
また、インフレータブル(膨張)型の有人居住モジュール(HIDAS)を展開する実験も披露された。このモジュールは小さく折りたたんでロケットに搭載し、月面で展開する。その展開作業もロボットが行う。
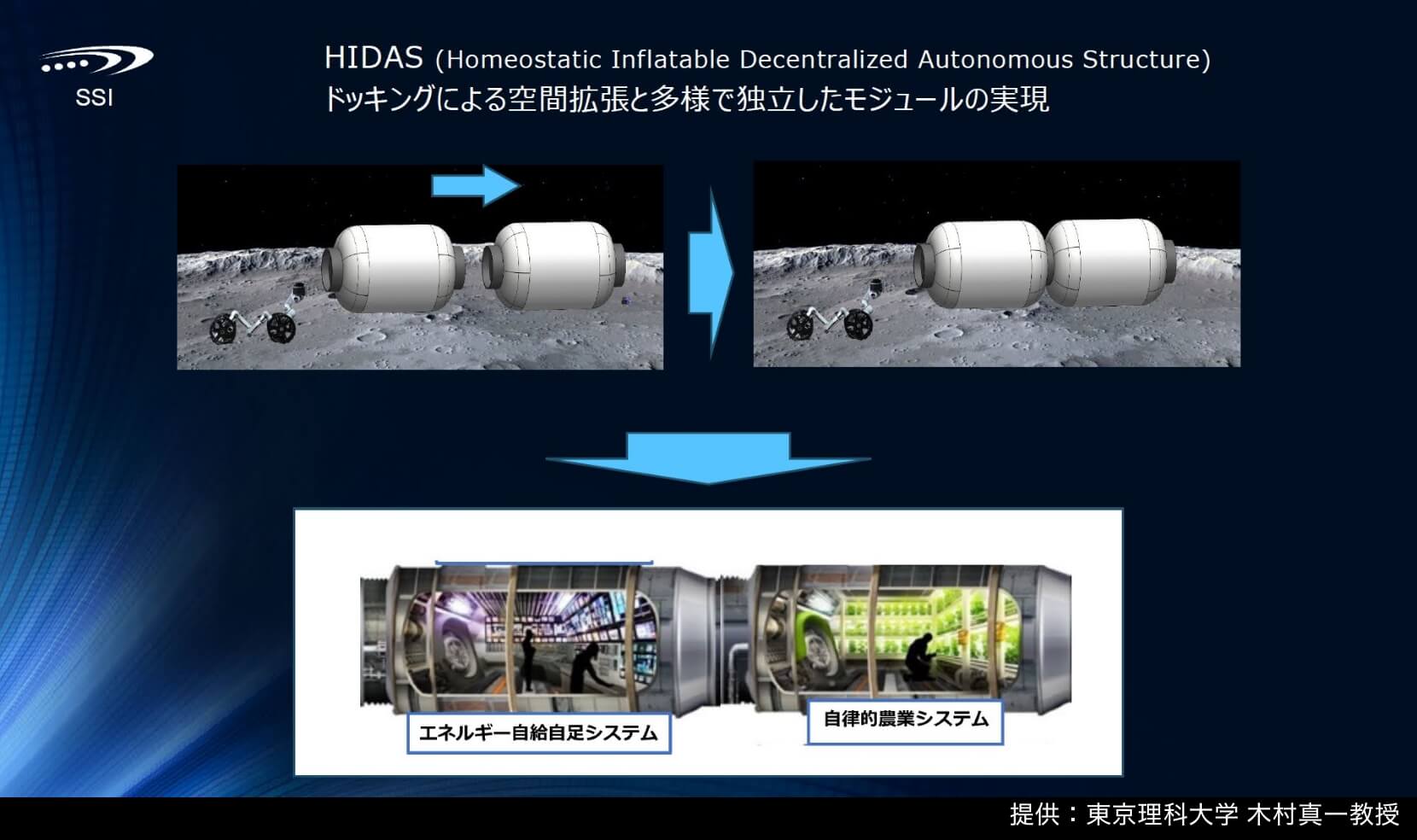

HIDASには骨組みがない。軽くて運搬しやすい一方で「穴が開いたらどうするといつも指摘される」と東京理科大学の木村真一教授。「その答えの一つが、HIDASを知能をもったセルの集合体として作ったこと。膨らませ方を変えることもできるし、移動も可能で知能をもつロボットとも言える」。木村教授は吉田プロジェクトにPI(課題推進者)として参加している。
HIDASが膨張する様子はロボット(MoonBotドラゴン)が現場監督を担う。まずは画像情報をもとにAIを使い、HIDASが月面上のどこにいるかを把握して移動、HIDASの1m手前で止まる。そして膨張する様子をモニターし、画像認識することでふくらみが足りないセルを自動で認識する。その箇所に近づいて健全性をチェックし展開を支援する。つまり、人がいない月面でロボット同士が助け合ってタスクを達成するというわけだ。
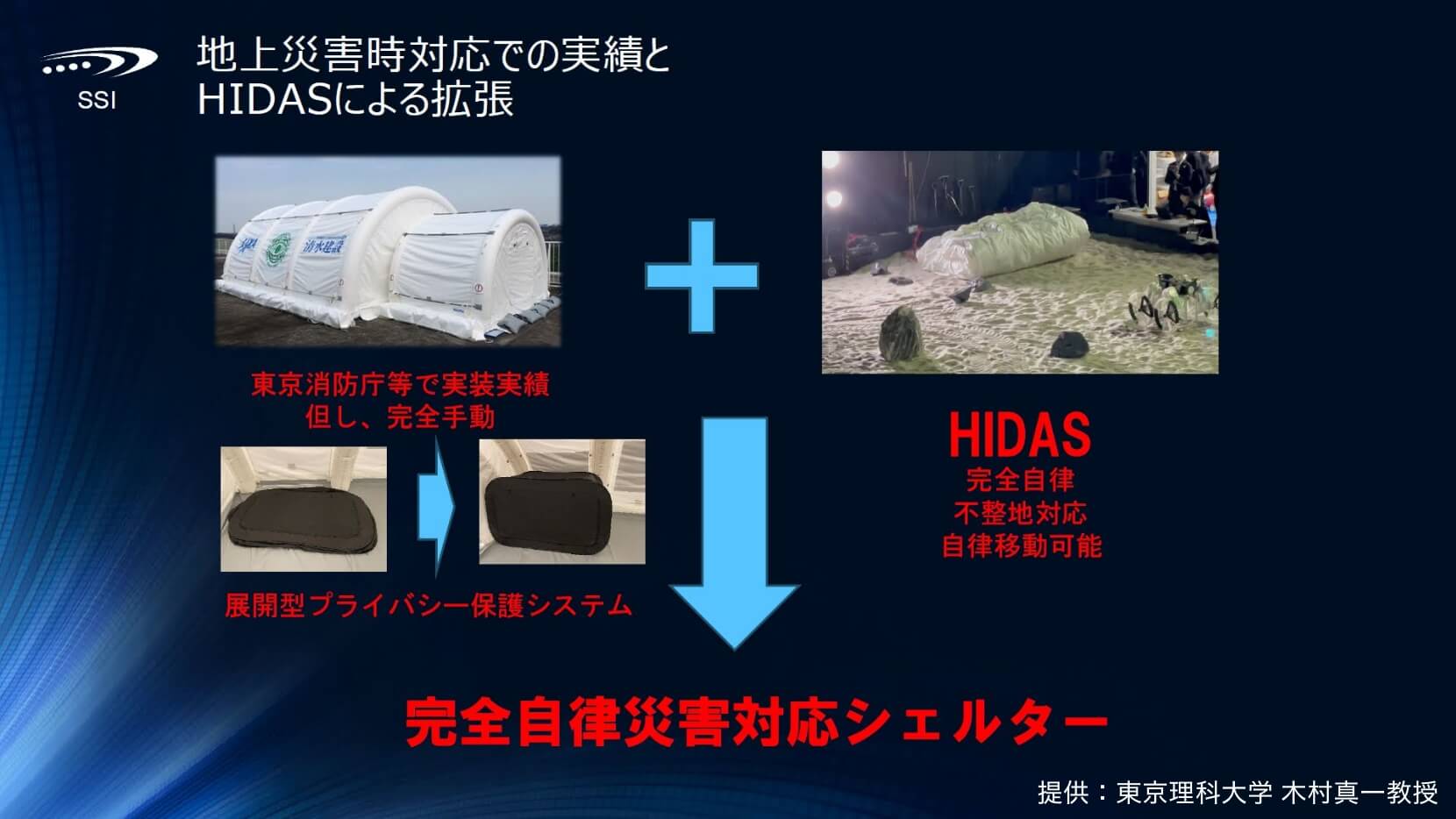
ちなみに、実際に月面で使う際には直径5mのものを想定しているという。居住用だけでなく、例えば2030年代に月面での運用が予定される有人与圧ローバーでトラブルが起こった際などに、宇宙飛行士が退避するシェルターにも使える。月面基地には溶岩ドームが適しているともされるが、溶岩ドーム内部でこの膨張型シェルターを使うことも可能だ。さらに、地上での災害時にシェルターとしても活用することができるという。
吉田教授は今後の5年間で宇宙環境で動くロボットを作り、2030年にはいくつかのロボットを月面で実証したいと考えている。「月のダストにどう対処するのか、宇宙で求められる信頼性にどこまで対応するのか。最後に残るのはハードウェアの問題だと思っている。日本の技術力で課題を解決したい」と吉田教授は意欲的だ。
ロボットが月面都市を構築する時代の人間の役割とは何か

月面都市の建設がロボットだけでできる。その時、人間の役割はなんだろう。吉田教授に聞いた。
「現在のISSでもそうだが、宇宙飛行士は科学などの知的な生産活動をしたくて宇宙に行っている。ところが現実的には(修理など)様々な問題で時間をとられていると聞く。宇宙に行く目的は建設作業や雑用ではない。可能な限りインフラを作る作業はロボットに任せるべき。でもロボットだけで100%はできない。人間が地上からスーパーバイズする。人間は現状を理解して次に何をすべきか決めて指示をする。それは(月面に行かなくても)地上からできると思います」とのこと。
あくまで人間は安全な空間で、知的な生産活動をするべきであると。さらに月面で現場監督をする必要もないそうだ。ISSの宇宙飛行士の中にはエンジニアリングの技術をもち、建設作業に腕をふるいたがる飛行士もいると聞くが、確かに安全を確保するという意味では、危険を伴う作業はできる限りロボットに行ってもらった方がいいだろう。
そしてこの技術の肝は地上にも活かせるということ。「災害現場ではどんな状況が発生するかおきてみないとわからない。そんな場面でモジュール型かつ変幻自在のロボットの能力は非常に役に立つと考えている」
人間が月面都市に行ったとき、大勢のロボットたちが出迎えてくれる。そんなSFのような未来が訪れようとしている。
- ※
本文中における会社名、商品名は、各社の商標または登録商標です。