業種別ソリューション
物流

RGV/AGV
サイクルタイム削減と安全性の向上
- 短時間の入出庫
- 設計開発コストの削減
- 立上げ及びメンテナンス時間の短縮
- 安全性の向上

課題解決
| 課題 | 解決 |
|---|---|
| 高速運転時や停止のスリップ影響抑止 | 複数エンコーダの組合せによる高応答、高精度な位置決め実現 |
| マルチ輪駆動制御 | 1軸分のシンプルな位置指令で多軸同時運転可能 |
| スピーディな立上げ | ファンクションブロック活用によるプログラム簡略化 |
| RGV/AGV小型化 | 多軸アンプ活用による省スペース実現 |
システム構成

特徴
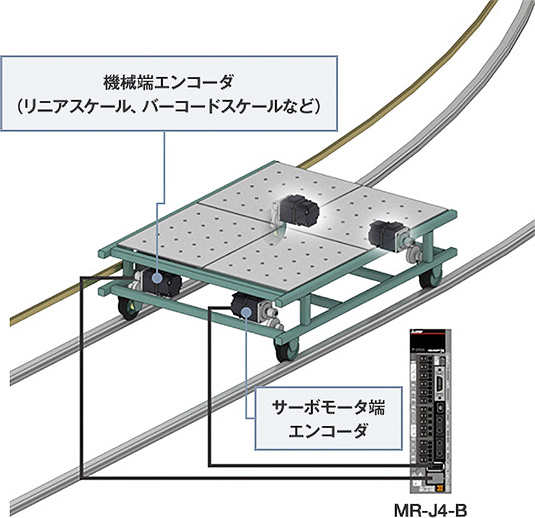
高速運転時や停止のスリップ影響抑止フルクローズド制御
モータエンコーダ,機械端エンコーダの組合せによる高応答/高精度な位置決めを実現
運転中:サーボモータ端、停止時:機械端に切換えて位置制御するため、ゲインの高い設定が可能。整定時間短縮化・駆動部スリップ影響を無効化し、高精度な位置決め制御が可能です。
フルクローズド制御の設定方法
当社エンジニアリングツールGX Works3にて軸1のサーボパラメータにフルクローズド制御の電子ギアを設定します。

GX Works3フルクローズド制御設定画面
RGV/AGVのシンプルな制御マスタ/スレーブ運転
1軸分の位置指令で多軸同時運転可能
サーボアンプ MR-J4-Bはドライバ間通信によりマスタ軸からスレーブ軸に同じトルクデータを送信できるため、シンプルモーションの同期制御を使用せずに多軸同時運転が可能です。

マスタ/スレーブ運転の設定
当社エンジニアリングツールGX Works3にてマスタ軸、スレーブ軸に対応したサーボパラメータを設定します。

GX Works3マスタ/スレーブ運転設定画面
スピーディな立上げファンクションブロック
ファンクションブロック(FB)活用によるプログラム簡略化
GX Works3のユニットFBにより、シーケンサCPUから位置決め制御やアドバンスト同期制御などのモーション制御を実行し、簡単にプログラミングできます。

ファンクションブロックによるプログラミング
当社エンジニアリングツールGX Works3にて当社が提供するユニットFBや登録 FBから、必要なFBをエディタ画面 にドラッグ&ドロップするだけで、簡単にプログラムが作成できます。
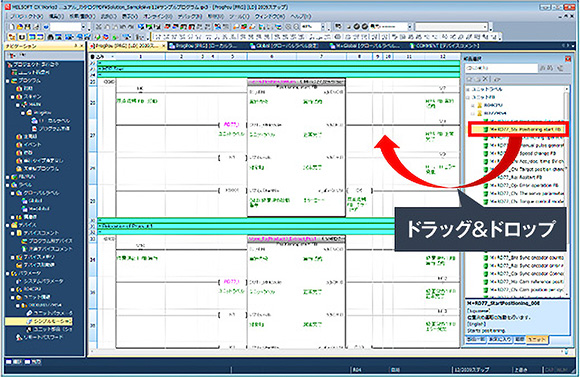
GX Works3 プログラム作成画面
RGV/AGV小型化多軸一体サーボアンプ
多軸アンプ(MR-J4W)活用による省スペース化実現
サーボアンプの性能を維持しながら省スペース化を実現します。














