![]()

容量選定 Motorizerは、機械の構成や仕様、動作パターンを入力することで、使用可能なモータを選定するためのソフトウェアです。ACサーボのほか、インバータやセンサレスサーボを含めた選定を行うことができます。

機械構成は14種類の中から選択できます。
ボールねじやラック&ピニオン、コンベヤでは、傾き角が設定できるようになりました。
<ボールねじ>

<ラック&ピニオン>

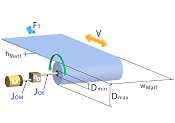
<ロールフィード>

<回転テーブル>

<台車>

<昇降機/ホイスト>

<コンベヤ>

<ファン>

<ポンプ>

<クランク>

<巻取り/巻出し>
<汎用機構 (回転)>

<汎用機構 (直動)>

<リニアサーボ>

諸元設定欄の左側に表示されているStep 1からStep 3まで順番に入力します。
横に電卓マーク(アイコン)が表示されている項目は、入力支援機能が使用できます。

Step 3で運転パターンを設定します。






Step 3の運転パターンまで設定が完了すると、選定候補が複数表示されます。
モータの形名やドライバの種類と容量のほか、それぞれの実効負荷率や慣性モーメント比などの計算結果が同時に表示されます。

表示条件タブを開くと、選定結果画面の表示項目のON/OFFを切替えることができます。

選定結果にチェックを付けて結果詳細タブを開くと、計算結果の詳細が表示されます。
制約事項なども表示されます。

多軸選定では、シンプルコンバータや電源回生共通コンバータなどを使用する場合、コンバータの容量を同時に選定することができます。

| 項目 | 内容 |
|---|---|
| モータ/ドライブの種類 | サーボ、インバータ、センサレスサーボ |
| 負荷機構の種類 | ボールねじ、ラック&ピニオン、ロールフィード、回転テーブル、台車、昇降機/ホイスト、コンベヤ、ファン、ポンプ、クランク、巻取り/巻出し、汎用機構 (回転)、汎用機構 (直動)、リニアサーボ |
| 伝達機構の種類 | カップリング、外付け減速機、Vベルト&プーリ、歯付ベルト/ローラーチェーン |
| 運転パターンの種類 | 定速/休止、加減速、台形、三角形、速度csvファイル、MELSOFT GX LogViewerファイル |
| 慣性モーメント入力支援の種類 | 中実円筒、中空円筒、円盤、直方体、円錐台、球、汎用 |
| 選定結果 | 判定、モータ種別、電源電圧、モータ、モータ容量、ドライブ、ドライブ容量、実効トルク、トルク実効負荷率、ピークトルク、ピーク負荷率、停止時実効トルク、停止時実効負荷率、モータ出力、モータ出力率、最大速度、最大速度率、最大負荷慣性モーメント、慣性モーメント比、回生電力、回生負荷率、回生オプション、最大トルクアップ、定格速度、ブレーキ、オイルシール、構造仕様、モータ端速度/モータ端トルク/モータ出力のグラフ |
| 結果出力印刷 | 負荷機構、伝達機構、運転パターン、選定結果を印刷 |
| データ保存 | 負荷機構、伝達機構、運転パターン、モータ選択、ドライブ選択、選定結果にファイル名を付けて保管 |
| 項目 | 内容 | |
|---|---|---|
| OS |
Microsoft® Windows® 11 (64ビット) Microsoft® Windows® 10 (64ビット/32ビット) |
|
| .NET Framework | .NET Framework 4.6以降 | |
| CPU (推奨) | Windows® 11 | 2コア以上の64ビット互換プロセッサまたはSystem on a Chip (SoC) |
| Windows® 11以外 |
デスクトップパソコン: Intel® Celeron® プロセッサ 2.4 GHz以上 ノートパソコン: Intel® Pentium® プロセッサ 1.9 GHz以上 | |
| メモリ (推奨) | Windows® 11 | 4 GB以上 (64ビット版OS) |
| Windows® 11以外 |
1 GB以上 (32ビット版OS) 2 GB以上 (64ビット版OS) |
|
| ハードディスク空き容量 | インストール時: HDの空き容量 1 GB以上 動作時: 仮想メモリの空き容量 512 MB以上 |
|
| ディスプレイ | 解像度1024 × 768以上 (XGA) 上記パソコンに接続可能なもの |
|