特集論文

三菱電機産業ロボット用力覚制御システム
2013年4月公開【全4回】 2013年6月公開【全4回】
名古屋製作所 藤島光城 村田健二
要旨
電気・電子分野に適した高速・高精度・スリムアームの新型産業用ロボット“Fシリーズ”で、組立て作業用途に求められる高難易度作業を実現する力覚制御システムを製品化した。
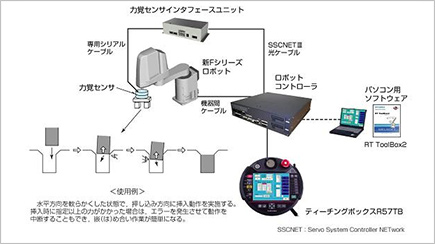
具体的には、ロボットアーム先端に6軸の力覚センサを取り付け、各軸方向の力3成分・各軸まわりのモーメント3成分をリアルタイムに高い精度で検出する。検出した力覚データを高信頼な“SSCNET III(光ケーブル)”通信でロボットコントローラに取り込み、柔らか制御、押し付け制御、力検知等の力覚制御をする。
この力覚制御を応用すれば、部品のばらつきによる位置ずれを吸収でき、また、正確な位置をティーチングできる等の機能が実現できるため、ロボットを用いたセルの構築/運用容易化が行えるようになる。
今回開発したのは、(1)力覚インタフェースユニット(力覚センサのデータをSSCNET III通信へ変換)、(2)ロボット用ソフトウェア(力覚制御)、(3)パソコン用ソフトウェア(力覚専用画面)、(4)ティーチングボックス用ソフトウェア(“R57TB/R33TB”力覚専用画面)である。構成を図に示す。
本稿では、主に力覚制御システムの機能と制御、及びロボットへの適用例について述べる。
- 要旨 三菱電機産業ロボット用力覚制御システム
- 第1回 ロボット用力覚制御システムの機能と制御方法(上)
- 第2回 ロボット用力覚制御システムの機能と制御方法(中)
- 第3回 ロボット用力覚制御システムの機能と制御方法(下)
- 第4回 力覚制御システムの適用事例