特集論文

アプリケーションパッケージ
“iQ Monozukuri HANDLING”
2018年10月公開【全3回】
名古屋製作所 葉石敦生 服部真充 松田辰啓 藤本陽太郎
要旨
個包装後の箱詰めやコンベヤ間の移載の用途では、ロボット機構とコンベヤ等周辺装置との同期が必要となる。このような用途では、1台のモーションコントローラによって、ロボット機構と周辺装置を同時に制御することが望まれる。
三菱電機のモーションコントローラを使用したロボットシステムの開発・立ち上げをサポートするため、各種のツールをセットにしたアプリケーションパッケージ “ iQ Monozukuri HANDLING ” を開発した。
iQ Monozukuri HANDLINGに搭載されているソフトウェアは次のとおりである。
- (1) マシン制御アドオンライブラリ
- (2) アプリケーションプログラム例
- (3) プログラミング支援ツール
- (4) マシン制御シミュレータ
ユーザーが製作するロボット機構の制御を行うためのマシン制御アドオンライブラリや、実際の用途を想定したアプリケーションプログラム例、プログラミング支援ツール、マシン制御シミュレータを使用して装置開発を行うことによって、立ち上げ時間の短縮が図れる。
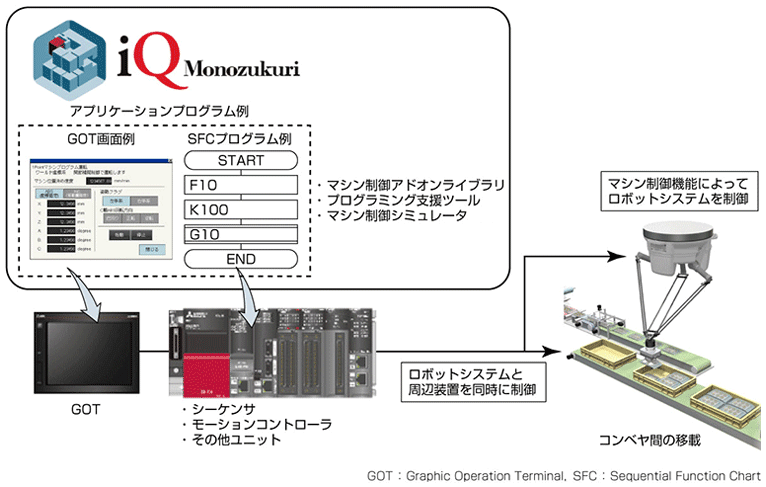
“ iQ Monozukuri HANDLING ” を使用したシステム構成例
iQ Monozukuri HANDLINGを使用することによって、モーションコントローラでロボットとコンベヤなどの周辺装置を制御できるため、システムコストの低減が図れる。また、モーションコントローラ一つで装置全体を制御するため、ロボットと周辺装置の同期制御が容易になる。ほかにも、プログラミングを支援するツールや、を提供しているので、ロボットの内製化と立ち上げ時間の短縮が可能になる。
参考文献
この記事をシェアする