![]()
![]()


MELSEC-Lシリーズはベースレス構造を採用し、制御盤内の省スペース化を実現しました。
ユニット拡張時には、ベースのスロット数による制約を受けず、必要なユニットを必要な分接続するだけで、より自由度の高い設計ができます。

シーケンサCPUからシンプルモーションの位置決めを始動します。
シンプルモーションは指定された位置決めデータNo.から運転を開始し、運転パターンが終了になるまで運転を続けます。

ギア、シャフト、変速機、カムなどの機械機構をソフトウェアに置き換えた同期制御が簡単に実現できます。


同期エンコーダからの入力パルスや仮想サーボアンプに同期して、同期制御、カム制御ができます。

シンプルモーションユニット(LD77MH)のプロジェクトやシーケンスプログラムは、シンプルモーションユニット(LD77MS)のプロジェクトに簡単に置き換え可能です。

Easy to Use !
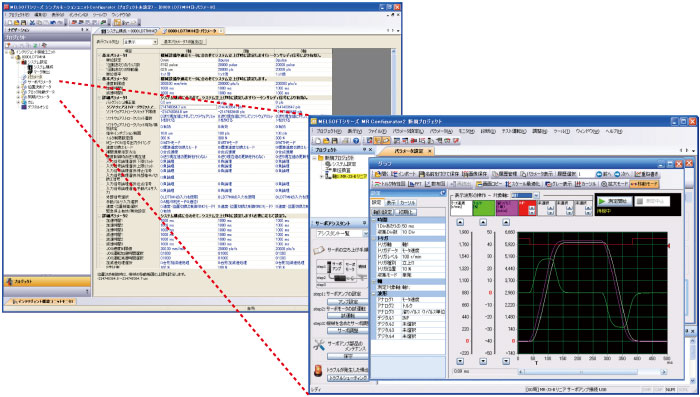
使いやすい操作性のエンジニアリング環境MELSOFT GX Works2のシンプルモーションユニット設定ツール)が強力にサポートします。
・位置決めデータ
データ設定アシスタント機能、補助円弧の自動計算などの機能により簡単に位置決めデータが設定できます。

・同期制御パラメータ
グラフィカルな画面での直感的な設定だけで、複雑な同期制御を実現できます。
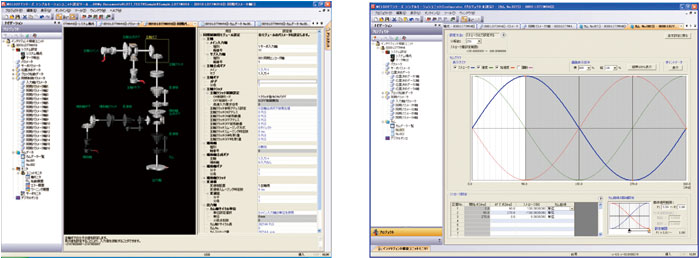
・デジタルオシロ
モーション演算周期に同期したデータ収集と波形表示により、動作確認、トラブルシュートを強力に支援します。

・サーボアンプのセットアップ
サーボアンプのパラメータ設定や調整は、シーケンサ経由のセットアップソフトウェアMR Configurator2で簡単に行えます。
| シンプルモーションユニット | |||
|---|---|---|---|
| LD77MS16 | LD77MS4 | LD77MS2 | |
| サーボアンプ接続方式 | SSCNETⅢ/H (150Mbps) | ||
| サーボアンプ間の 最大接続距離[m] |
100 | ||
| 接続サーボアンプ | MR-J4-B(-RJ), MR-J4W-B詳細はこちら | ||
| 最大制御軸数 | 16軸 | 4軸 | 2軸 |
| 演算周期[ms] | 0.88 / 1.77 | 0.88~ | |
| エンジニアリング環境 | シンプルモーションユニット設定ツール ※1 MR Configurator2 | ||
| 制御方式 |
PTP(Point To Point)制御、位置制御、速度制御、
トルク制御 同期制御 位置・速度切換え制御(INC) |
||
| 制御単位 | mm,inch,degree,PULSE | ||
| 位置決めデータ数 | 600データ(位置決めデータNo.1~600)/軸 (MELSOFT GX Works2,シーケンスプログラムでの設定が可能) |
||
| 加減速方式 | 台形加減速、S字加減速 | ||
| 手動制御 | JOG運転、手動パルサ運転、インチング運転 | ||
| 制御内容を変更する機能 |
現在値変更、
目標位置変更機能 |
||
| 原点復帰方式 |
近点ドグ式、カウント式1、カウント式2、データセット式、スケール原点信号検出式、 ドライバ原点復帰式※2 |
||
| 補助機能 |
緊急停止機能、H/Wストロークリミット機能、S/Wストロークリミット機能、絶対位置システム、 アンプなし運転機能、無限長送り機能、 任意データモニタ機能 フラッシュROMバックアップ、 ユニットエラー履歴収集機能 カム自動生成機能 |
||
| 入出力占有点数 | 32点(I/O割付:インテリジェント機能ユニット32点) | ||
| DC5V内部消費電流[A] | 0.70 | 0.55 | |
| 質量[kg] | 0.22 | ||
※1:シンプルモーションユニット設定ツールはMELSOFT GX Works2に含まれています。
※2:ドライバ(サーボアンプ)に設定された原点復帰方式を使用します。