MELSERVO-J5シリーズ サーボアンプ 先進性・操作性
 width="1440" height="320" decoding="async">
width="1440" height="320" decoding="async">- 調整機能
- 省エネ・省スペース・省配線 (100 V/200 V環境)NEW
- 省エネ・省スペース・省配線 (400 V環境)
- 大容量サーボアンプを活用した省エネシステムNEW
- 圧力制御NEW
- 軌跡制御
- 安全監視機能
- 用途に合わせた駆動システムに対応
- 基板タイプサーボアンプNEW
- 関連リンク
調整機能
装置の要求性能に応じて、最適な調整方法を選択できます。

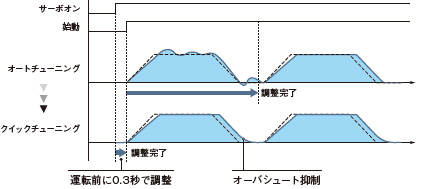
クイックチューニング
サーボオンするだけで、自動で振動やオーバシュートを抑制し、すぐに使えるクイックチューニングです。通常運転する前に自動加振し、0.3秒で制御ゲインや機械共振抑制フィルタを調整して、通常運転します。
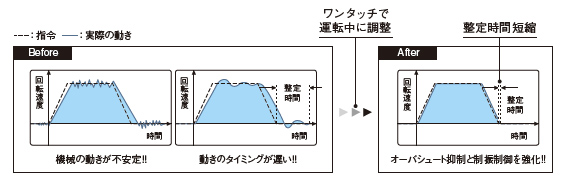
ワンタッチ調整
ワンタッチ調整機能をオンするだけで、機械特性に応じた調整をして整定時間を短縮できます。
機械共振抑制フィルタ、アドバンスト制振制御Ⅱ、ロバストフィルタを含めたサーボゲイン調整が完了。オーバシュート抑制と制振制御を強化し、装置の性能が更に向上します。
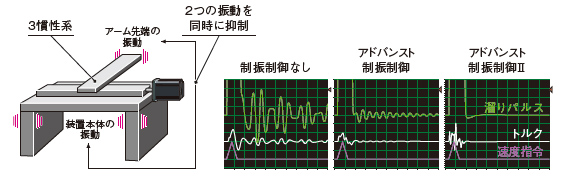
アドバンスト制振制御Ⅱ
3慣性系の機械に対応した振動抑制アルゴリズムにより、低周波振動を2つ同時に抑制可能。調整もMR Configurator2から簡単に実施できます。アーム先端や装置本体で発生する、約100 Hz以下の比較的低い周波数の残留振動の抑制に効果を発揮します。残留振動の抑制により整定時間を短縮できます。
指令ノッチフィルタ
指令ノッチフィルタは約1 Hzから2000 Hzまで設定可能なので、機械振動周波数に近い設定ができます。
機械共振抑制フィルタ
適用周波数範囲を10 Hz~8000 Hzに拡張。適用可能なフィルタ数は5個あり、機械の振動抑制性能を向上します。機械共振の周波数はMR Configurator2のマシンアナライザにて把握できます。
省エネ・省スペース・省配線 (100 V/200 V環境)NEW
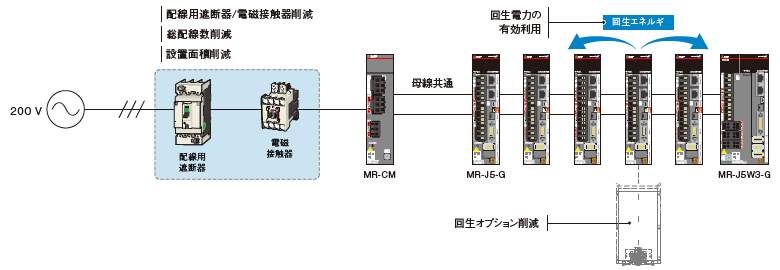
シンプルコンバータ MR-CM
母線共通接続により、回生電力の有効利用による省エネを実現し、回生エネルギを各サーボアンプに分散することで回生オプションを削減 *2できます。
また、配線用遮断器/電磁接触器を削減し、省配線を実現できます。
渡り配線用のデイジーチェーン電源コネクタにより、母線や制御回路電源の配線作業が容易になります。
MR-CM3Kは200 V環境でサーボアンプの定格容量の合計3 kW、最大6台の200 Vサーボアンプを接続可能です。
MR-CM08K1は100 V環境でサーボアンプの定格容量の合計800 W、最大3軸の200 Vサーボアンプを接続可能です。
[MR-CM3K使用の場合]
- *1MR-J5-B, MR-J5-Aサーボアンプも使用できます。
- *2回生オプションは、運転パターンやシステム構成によって削減できます。
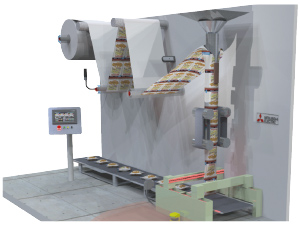
[縦ピロー包装機]
包装用フィルム巻出し軸の回生エネルギを搬送ローラ軸などに利用できます。
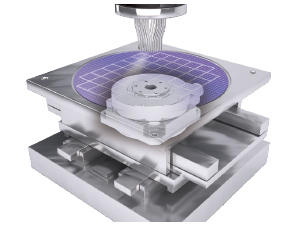
[ウェハーテスタ]
クリーンルームに設置される半導体製造装置の省スペース化に貢献します。
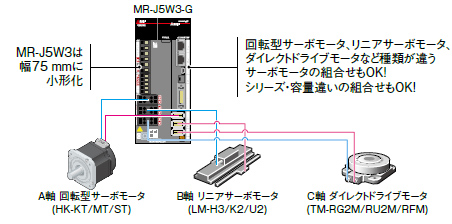
多軸サーボアンプ
1ユニットで2台のサーボモータを駆動できる2軸サーボアンプ、1ユニットで3台のサーボモータを駆動できる3軸サーボアンプをラインアップ。装置の省エネ・小形化を実現します。また、サーボモータは回転型、リニア、ダイレクトドライブモータを任意に組み合わせて使用することができます。
- [2軸サーボアンプ]
CC-Link IE TSN対応:MR-J5W2-GSSCNETⅢ/H対応:MR-J5W2-B
- [3軸サーボアンプ]
CC-Link IE TSN対応:MR-J5W3-GSSCNETⅢ/H対応:MR-J5W3-B
省エネ・省スペース・省配線 (400 V環境)
コンバータ分離型ドライブユニット MR-J5D_-G4
- 母線共通接続による省エネ、省スペース、省配線
- MR-J5D2-G4 (2軸) /MR-J5D3-G4 (3軸) による、さらなる省スペース、省配線
- 安全監視機能を標準MR-J5D_-G4で対応し、CC-Link IE TSNの安全通信では軸ごとにSTOなども可能
- 冷却ファンのユニット化により、冷却ファンをユーザにて簡単に交換可能
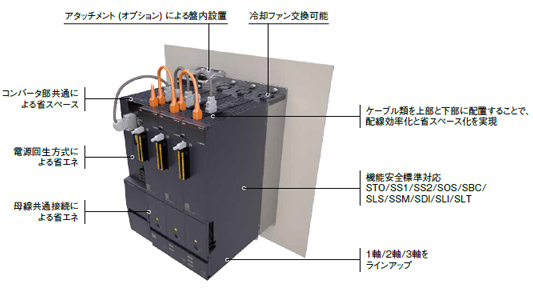
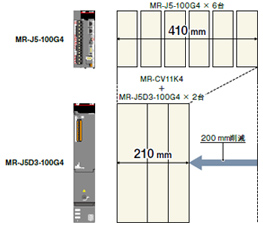
3軸ドライブユニットによる省スペース化 (スリム化)
400 V仕様3軸ドライブユニットにより、省スペース化を実現しました。
例えば1 kWを6軸使用する場合、横幅を200 mmスリム化できます。
またノーヒューズ遮断器や電磁接触器も削減できます。
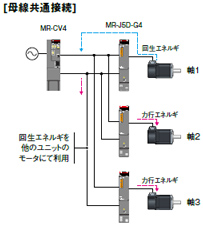
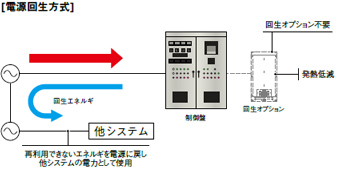
母線共通接続と電源回生方式採用による省エネシステムに対応
電源回生コンバータユニットMR-CV4と複数のドライブユニットMR-J5D_-G4を母線共通接続すると、ある軸の回生エネルギを、他の軸のモータ駆動エネルギとして利用することが可能。
電源回生コンバータユニットMR-CV4は、回生エネルギを電源に戻す電源回生方式を採用。他システムの電力として使用可能であるため、省エネに貢献します。また、回生オプションは不要のため、発熱を低減します。
[印刷機]
ユニット毎に駆動するセクショナルドライブ方式の輪転機に最適です。
[スリッター]
巻出し軸、ローラ軸、巻取り軸で構成されたコンバーティング装置に最適です。
大容量サーボアンプを活用した省エネシステムNEW
大容量サーボアンプ (12~25 kW) に内蔵されたコンバータを活用し、コンバータユニットなどのオプションなしで母線共通接続による省エネシステムを構築できます。

圧力制御NEW
高精度で安定した圧力制御を実現
圧力センサ (ロードセル *1)
のアナログ信号をMR-J5-G-LL/MR-J5-B-LLに取り込み、圧力制御を行います。
負荷が変動しても圧力を一定に保持できます。
圧力モデル適応制御を使用することで、押し込み過ぎない高応答な圧力制御が可能です。
- *1.力を測定するセンサで、力を電気信号に変換して圧力の測定が可能です。

軌跡制御
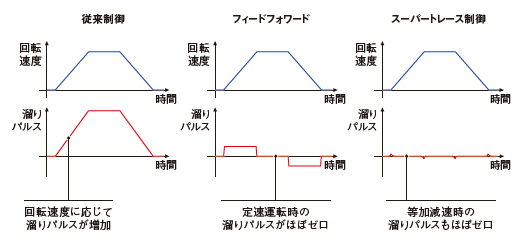
スーパートレース制御
定速運転時のみだけではなく、等加減速時の溜りパルスをほぼ0にすることができる制御です。剛性の高い装置において、軌跡精度を向上させることが可能です。
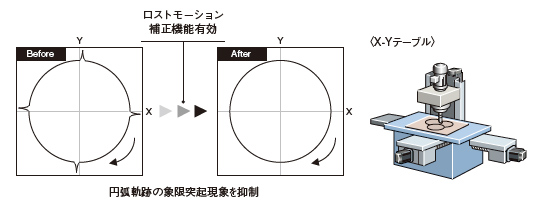
ロストモーション補正
XYテーブルなどの軌跡制御において、円弧軌跡の精度を向上します。
摩擦やねじれなどの影響によって、サーボモータ回転方向反転時に発生する、象限突起現象を抑制します。
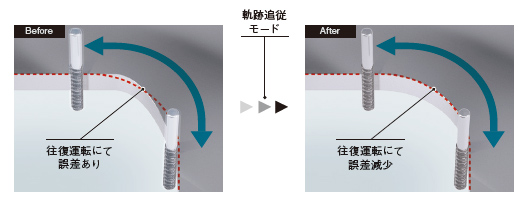
軌跡追従型モデル適応制御
軌跡追従モードを選択することにより、往復運転における軌跡誤差を小さくすることが可能です。
通常はモデル適応制御にて位置決め制御し、整定時間を短くするように調整されますが、本機能でオーバシュートを小さくし、軌跡精度を向上させることができます。加工機などの高い軌跡精度が要求される機械に適しています。
安全監視機能
セーフティ機能を内蔵し、安全監視機能の拡充
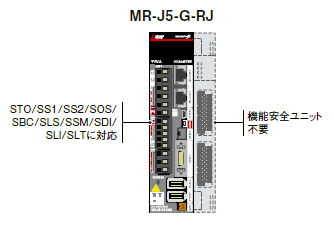
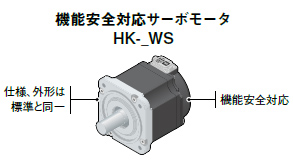
MR-J5-G-HS/MR-J5-G-RJ/MR-J5W_-G/MR-J5D_-G4は安全制御部を内蔵し、機能安全ユニットなしで安全監視機能に対応します。機能安全対応サーボモータHK-_WSと組み合わせて、さらに安全性レベルが向上します。
STO/SS1/SS2/SOS/SBC/SLS/SSM/SDI/SLI/SLTの安全監視機能を、SIL 2またはSIL 3の安全性レベルで提供します。
機能安全対応サーボモータはサーボアンプの安全監視機能に必要な位置や速度を、カテゴリ4, PL e, SIL 3の安全性レベルで提供します。
また、標準サーボモータと同じエンコーダケーブルが使えます。
安全機能の拡充
安全監視機能を強化し、装置の安全性向上に貢献します。
| 項目 | MR-J5-G MR-J5-B(-RJ) MR-J5W_-B MR-J5-A(-RJ) |
MR-J5-G-RJ MR-J5W_-G MR-J5D_-G4 |
MR-J5-G-HS | |
|---|---|---|---|---|
| 機能安全 | 安全監視機能 | STO | STO/SS1/SS2/SOS/SBC/SLS/SSM/SDI/SLI/SLT | |
| ネットワーク経由による安全監視機能 | 非対応 | 対応*1 | ||
| 入力デバイス | 1点 | 3点 | ||
| 出力デバイス | 1点 | 3点 | ||
- *1.EtherNet/IP®は対応していません。
機能安全入出力信号による安全監視
MR-J5-G-HSは安全CPUや安全リモートIOを使用せずに機能安全入出力信号を直接配線することで、安全システムを柔軟に構築することができます。
3点の機能安全入出力信号により、複数の安全監視に対応できます。
直接配線の場合、MR-J5G-HSのテストパルス診断により安全監視機能をカテゴリ4, PL e, SIL 3の安全性レベルで提供します。

安全コントローラを使用した場合、安全機器のロジックを簡単に作成できます。
安全コントローラのテストパルス診断により安全監視機能をカテゴリ4, PL e, SIL 3の安全性レベルで提供します。

- *1.MR-J5-G-HSで安全入力信号のテストパルス診断をすることでカテゴリ4, PL e, SIL 3が 可能です。
- *2.カテゴリ4, PL e, SIL 3に適合した安全コントローラやMR-J5-G-HSで安全信号のテストパ ルス診断を行った場合、カテゴリ4, PL e, SIL 3です。
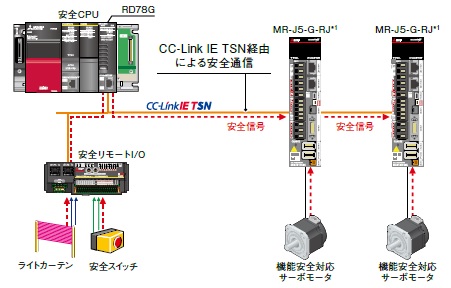
CC-Link IE TSNの安全通信機能に対応 *2
CC-Link IE
TSNは一般制御と安全制御を混在させたシステムを構築することができます。
MR-J5-G-HS/MR-J5-G-RJ/MR-J5W_-G/MR-J5D_-G4は、安全CPU
R□SFCPU-SETとモーションユニットRD78Gを組み合わせて、CC-Link IE
TSN経由で安全CPUの安全信号データを受け取ることが可能です。そのため、安全信号をサーボアンプに直接配線する必要がありません。
- *1.対応するサーボアンプについては、安全監視機能を参照してください。
- *2.MR-J5-G-HSN1/MR-J5-G-RJN1/MR-J5W_-GーN1/MR-J5D_-G4ーN1はEtherCAT®の安全データ通信を行うプロトコル (Safety over EtherCAT®) に対応します。
用途に合わせた駆動システムに対応
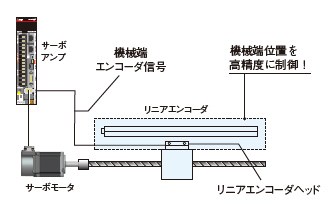
フルクローズド制御に標準対応*1
MR-J5-G/MR-J5W2-G/MR-J5D1-G4/MR-J5D2-G4/MR-J5-B/MR-J5W2-B/MR-J5-Aサーボアンプは、標準でフルクローズド制御に対応。
機械端の高精度制御を実現します。
- *1.2線式シリアルエンコーダに対応しています。4線式シリアルおよびパルス列インタフェース (ABZ相差動出力タイプ) のエンコーダにはMR-J5-G-HS/MR-J5-G-RJ/MR-J5D1-G4/MR-J5-B-RJ/MR-J5-A-RJサーボアンプで対応しています。
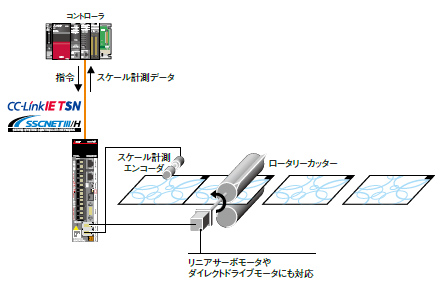
スケール計測機能
スケール計測機能は、リニアエンコーダやロータリエンコーダなどのスケール計測エンコーダとサーボアンプを接続し、スケール計測データをネットワーク経由でコントローラに送信する機能です。
スケール計測機能を用いることで、スケール計測エンコーダからの配線の自由度が上がります。
スケール計測機能に対応したサーボアンプ
- [CC-Link IE TSN対応]
2線式: MR-J5-G/MR-J5-G-HS/MR-J5-G-RJ/MR-J5W2-G/
MR-J5D1-G4/MR-J5D2-G44線式: MR-J5-G-HS/MR-J5-G-RJ/MR-J5D1-G4
- [SSCNETⅢ/H対応]
2線式: MR-J5-B/MR-J5-B-RJ/MR-J5W2-B4線式: MR-J5-B-RJ
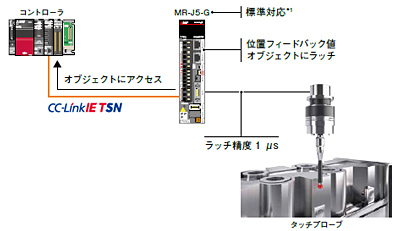
タッチプローブ機能
タッチプローブ機能は、ワークの位置を検出するセンサなど (タッチプローブ) とサーボアンプを接続し、タッチプローブで検知したときの位置をラッチ (記憶) する機能です。
コントローラからこのラッチした値を読み込み、ワークの位置ずれ補正などに使用します。タッチプローブ機能のラッチ精度は1 μsです。
タッチプローブ機能に対応したサーボアンプ
- [CC-Link IE TSN対応]
MR-J5-G *1/MR-J5-G-HS/MR-J5-G-RJ/MR-J5W_-G/MR-J5D_-G4
- *1.2021年6月以降に製造されたMR-J5-Gを使用してください。
CC-Link IE TSNマスタ・ローカルユニットによる位置決め
CANopen®に対応したCC-Link IE TSNマスタ・ローカルユニット*2にてサーボアンプを制御できます。*1
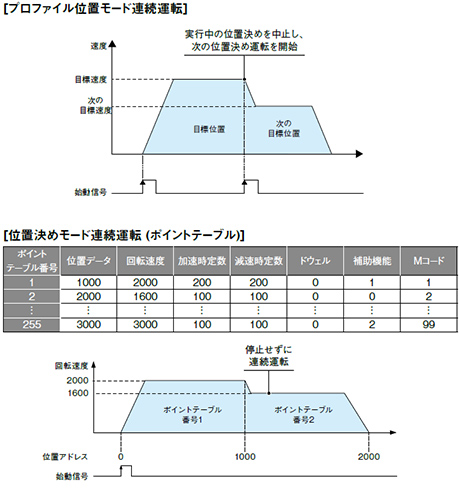
サーボアンプはプロファイルモード (位置/速度/トルク) と位置決めモード (ポイントテーブル) の2つの方式に対応しています。*3
例えば、プロファイル位置モードでは、マスタ局から目標位置や目標速度などを設定し、始動信号オンするだけで、サーボアンプが目標位置までの指令を生成し、位置決め運転を開始します。
- *1.モーションユニットRD78G/FX5-SSC-GもCANopen®に対応しています。
- *2.CC-Link IE TSNマスタ・ローカルユニットについては、各ユニットのマニュアルを参照してください。
- *3.制御可能なモードはマスタ局の仕様を参照してください。
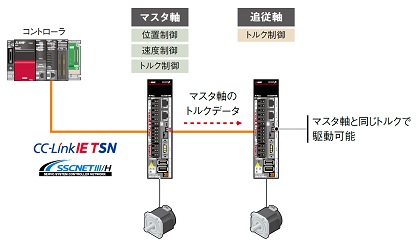
ドライバ間通信機能
MR-J5-G/MR-J5D1-G4/MR-J5-Bサーボアンプのドライバ間通信によりマスタ軸のトルクを追従軸 (複数軸可能) へ送信し、そのトルクを指令として追従軸をトルク制御運転することが可能です。マスタ軸から追従軸へのトルクデータの送信は、ネットワークを介して行うため、特別な配線追加は必要ありません。
- *MR-J5-G-N1/MR-J5D1-G4-N1は本機能には対応していません。
SEMI F47準拠
半導体・液晶製造装置への対応として、SEMI F47規格に準拠 *1。(単相AC200 V入力、DC入力およびMR-J5D_-G4は適用外です。)
- *1.主回路電源の瞬時停電については、電源インピーダンスや運転状況に応じてバックアップコンデンサが必要な場合があります。必ずお客様の装置でSEMI F47 (半導体プロセス装置電圧サグ対応力のための仕様) 規格に対する実機試験、詳細確認を実施してください。サーボアンプへの入力は三相電源を使用してください。
耐環境性向上
耐環境性向上のため、腐食性ガス環境下での腐食に対して耐性向上を図った特殊コーティング仕様品を準備しております。
詳細については、営業窓口にお問合せください。
基板タイプサーボアンプNEW
小型装置対応
小型サーボモータと基板タイプサーボアンプ (3軸CC-Link IE TSN/EtherCAT®インタフェース) *1にて小型装置に対応します。

- *1.CC-Link IE TSNはMR-MD333Gで、EtherCAT®はMR-MD333G-N1で対応しています。
- *2.HG-AKシリーズの詳細についてはMELSERVO-J4を参照ください。
省配線化への貢献
MR-MD333Gは、お客様の装置の可動部 (ヘッド部) への搭載が可能です。
ヘッド部のモータ配線の最短化・軽量化に貢献します。

耐振動環境
MR-MD333Gはお客様の装置可動部 (ヘッド部) への搭載を想定しており、耐振動39 m/s2まで保証します。
MR-J5シリーズは耐振動5.9 m/s2までの対応のため、MR-MD333Gは振動環境に優位です。
