オプション 力覚センサセット

-
ダウン
ロード -
お問い
合わせ -
チャット
ボット -
シェア
- 特長
- 製品一覧・仕様
- 規格適合品
- 生産終了品
力覚センサとは


ハンドにかかる力を感じながら、人と同じように組立・加工作業を行います。微小な力加減・力検知を必要とする作業を実現します.
- 6自由度の力覚センサ情報を用いて、ロボットに力感覚を持たせます。
- ロボットプログラム言語(MELFA-BASIC)上で使用できる専用命令や状態変数を使用します。
- 今までのロボットでは難しかった、微小な力加減・力検知を必要とする作業を実現します。
※製品仕様などの詳細はカタログをご覧ください。

特長
生産の安定性を向上
- 部品のバラツキによる位置ズレ吸収や、微小な外力に倣いながら部品を傷めずに挿入・組付けが可能です。
- 作業失敗時のポジションラッチ、リトライ処理による作業安定性を向上します。
- ログデータによる品質管理や作業ミスの原因解析ができます。
複雑な組立・加工作業を実現
- 微小な外力に倣いながら部品を傷めずに挿入・組付けが可能です。
- 力検知により動作方向や押付け力を変更したり、位置情報や力情報を組合わせたトリガ条件にて割込み処理を実行することができます。
簡単制御・簡単操作
- 専用ロボット言語で簡単にプログラミングできます。
- 代表的なアプリケーションプログラム例をもとに、お客様の作業に合わせて容易に作業プログラムの作成ができます。
- 位置と力のデータや、エンジニアリングソフトウェア(RT ToolBox3)上のグラフ波形を見ながら、作業状態の確認・調整が可能です
主な機能
基本機能
力覚制御
「柔らかさ」や「力」を制御します。動作中に制御特性の変更が可能です。
力を一定に保持できるため、ワークをキズつけることなく扱うことができます。
力覚検知
過渡的な状態に応じて動作を切り替え可能です。位相合わせなど複雑な組付け作業を実現します
力覚ログ
作業状態確認し、調整を容易とします。また、ログデータ分析で予防保全を行えます。
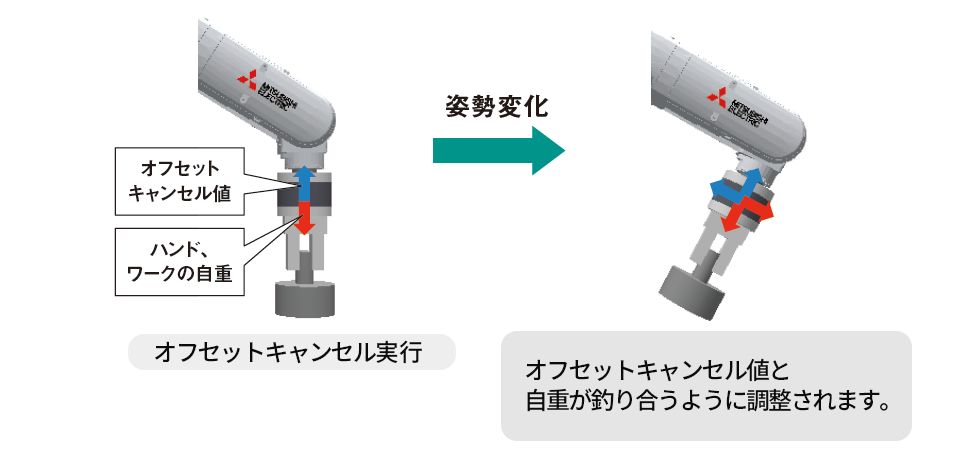
重力オフセットキャンセル
姿勢変化時の力覚センサにかかるXYZ方向の力の変化に対応して重力補償します。
この機能により、姿勢が変化しても正常に力覚制御を可能にします。
教示作業支援
パソコンサポートソフトウェア(RT ToolBox3)や、ティーチングボックス(R56TB,R32TB)に力覚GUI画面を搭載。
簡単に力覚センサの操作が可能です。
- 力覚GUI画面で反力を確認しながらのティーチングが可能です。
- 力データをログデータとして保存、パソコンに転送可能です。
- ログデータをグラフ表示可能です。

操作説明動画
仕様とシステム構成

力覚センサの選定 仕様とシステム構成
取付と配線

力覚センサの取付と配線 取付向き

力覚センサの取付と配線 配線接続
動作確認

キャリブレーション 力制御座標系&パラメータの設定&説明

設定後の確認
基本操作

力制御(1) 力指令&力覚ログ

力制御(2) モード切替&オシログラフ

スティフネス制御

制御特性変更 FsGChg

制御特性変更 Moトリガー

力覚検知
関連カタログ
※製品仕様などの詳細はカタログをご覧ください。