業種別ソリューション
リチウムイオン電池

Module、PACKライン
- 高速トラッキング
- 高速・高精度搬送
- ロボットと人協働作業

課題解決
| 課題 | 解決 |
|---|---|
| 装置の振動を抑え、高速・高精度な搬送をしたい | 高速・高精度搬送 |
| 生産性を向上させたい | ロボットと人協働作業 |
課題
装置の振動を抑え、高速・高精度な搬送をしたい
解決
ロボット高速トラッキングロボット高速・高精度搬送技術
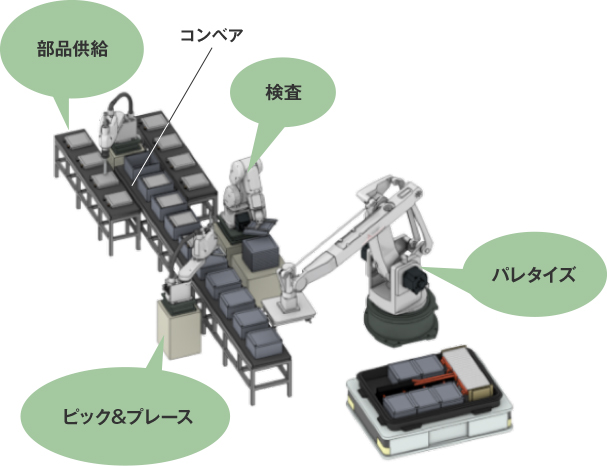
■ ロボット高速トラッキング
- 外部エンコーダデータおよびCCD検出によって、コンベア上のバッテリの位置を高速追従させ、次のコンベアに高速搬送を実現します。
Point
- コンベア停止せず、さらにバッテリの位置と角度はバラバラの状態でも高速搬送可能で生産性向上。

■ ロボット高速・高精度搬送技術
- ロボットによる高速パレタイジング動作。アーム長、構造をパレタイズ作業に最適化し、レイアウトの自由度が向上します。
Point
- 位置ゲインをリアルタイムで変更し軌跡精度の向上を実現し、さらに高精度ビジョンや力覚センサも活用可能。
関連製品


課題
生産性を向上させたい
解決
ロボットと人協働作業による生産性の向上
- 国際安全規格の要求に適合した高い安全性により、協働作業が可能。人がロボット動作域に侵入・退出の際も、システムを停止することなく生産継続を実現します。
Point
- 監視平面設定による人作業エリアとロボット稼働エリアを隔離し安全対策が可能。