![]()

張力センサフィードバック速度制御 張力検出器の値によりPID制御を行い、指定張力となるように速度制御を行います。
|
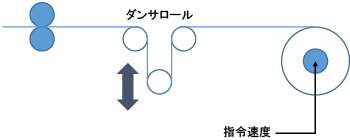
ダンサフィードバック速度制御 ダンサロールの位置を検出して、目標位置となるように速度制御を行います。
|
張力センサフィードバックトルク制御 張力検出器の値によりPID制御を行い、張力設定値となるようにトルク制御を行います。
|
張力センサレストルク制御 巻出しおよび巻取りにおいて、センサレスでトルク制御による張力制御を行います。
|
張力センサフィードバック制御やダンサフィードバック制御における張力制御ゲインを自動調整します。
ワークの端をエッジセンサで検出し、位置を補正します。巻きジワや変形を防止し、巻取りを綺麗に仕上げます。



扁平形の巻取り軸で、送り速度が一定となるようにカムパターンを生成します。