Worldwide
検索
FAトップ
ソリューション
ソリューション
ソリューション トップ
e-F@ctoryについて
e-F@ctoryのご紹介
エッジコンピューティング
IoT化の評価指標「SMKL」
IoT化ソリューション
業種別ソリューション
自動車
電気・電子分野
リチウムイオン電池
物流
データセンター
食品・飲料
目的別ソリューション
カーボンニュートラル
FAリモート
設計・立上効率化
データ収集・分析
トータル保全
機械加工ラインDX
安全
計装/二重化
OTセキュリティ
センサソリューション
組込みシステム
導入事例
IoT活用事例
課題解決ガイドブック
e-F@ctory Alliance
Media Library
The Art of Manufacturing
(FAデジタルマガジン)
+FA
カタログ資料請求
製品情報
製品情報
製品情報 トップ
産業用PC
産業用PC MELIPC
産業用PC MELIPC トップ
MELIPC MI5000
MELIPC MI3000
MELIPC MI2000
MELIPC MI1000
制御機器
シーケンサ MELSEC
シーケンサ MELSEC トップ
MELSEC iQ-Rシリーズ
MELSEC iQ-Fシリーズ
MELSEC-Qシリーズ
MELSEC-Lシリーズ
MELSEC-Fシリーズ
MELSEC-QS/WSシリーズ
MELSEC-Aシリーズ
ネットワーク関連製品
エンジニアリングソフトウェア
サーボシステムコントローラ
サーボシステムコントローラ トップ
MELSEC iQ-Rシリーズ
MELSEC iQ-Fシリーズ
MELSEC-Qシリーズ
MELSEC-Lシリーズ
組込み型サーボシステムコントローラ
モーションソフトウェア
ネットワーク関連製品
FAアプリケーションパッケージ iQ Monozukuri
エンジニアリングソフトウェア
数値制御装置
数値制御装置(CNC)
数値制御装置(CNC) トップ
CNC数値制御装置
ドライブユニット
サーボモータ
主軸モータ
ソフトウェアツール
IoT関連製品
FAセンサ
FAセンサ MELSENSOR
FAセンサ MELSENSOR トップ
ビジョンセンサ
コードリーダ
駆動機器
ACサーボ MELSERVO
ACサーボ MELSERVO トップ
MELSERVO-J5
MELSERVO-J4
MELSERVO-JN
サーボ支援ソフトウェア
サーボモータ用減速機
サーボモータ用減速機 トップ
センサレスサーボ
センサレスサーボ トップ
FREQROL-E700EXシリーズ
FREQROL-D700-Gシリーズ
モータ
エンジニアリングソフトウェア
インバータ FREQROL
インバータ FREQROL トップ
FREQROL-Aシリーズ
FREQROL-A800 Plusシリーズ
FREQROL-Bシリーズ
FREQROL-Fシリーズ
FREQROL-Eシリーズ
FREQROL-Dシリーズ
電源回生コンバータ
IPMモータ
エンジニアリングソフトウェア
三相モータ
三相モータ トップ
サステナブルモータ
トップランナーモータ
海外規格適合モータ
高効率モータ
標準効率モータ
耐圧防爆形モータ
IPMモータ
ギヤードモータ
ギヤードモータ トップ
ギヤードモータ平行軸
ギヤードモータ直交軸
S-PM平行軸
S-PM直交軸
電磁クラッチ・ブレーキ
電磁クラッチ・ブレーキ トップ
パウダクラッチ
パウダブレーキ
ヒステリシスクラッチ
ヒステリシスブレーキ
テンションコントローラ
テンションコントローラ トップ
フィードバック式テンションコントローラ
オープンループ式テンションコントローラ
クラッチ用アンプ
テンションメータ
張力検出器
オプション
HMI
表示器 GOT
表示器 GOT トップ
GOT2000シリーズ
GOT1000シリーズ
防爆形GOTシリーズ
GT SoftGOT
FAアプリケーションパッケージ iQ Monozukuri
エンジニアリングソフトウェア
ロボット
産業用ロボット MELFA
産業用ロボット MELFA トップ
垂直多関節形
水平多関節形
iQ Care MELFA Support
MELFA Smart Plus
耐環境仕様(医薬品・食品対応)
オプション
物流用
FAアプリケーションパッケージ iQ Monozukuri
エンジニアリングソフトウェア
旧製品
協働ロボット ASSISTA
協働ロボット ASSISTA トップ
協働ロボット ASSISTA
iQ Care MELFA Support
オプション
エンジニアリングソフトウェア
低圧配電制御機器
低圧遮断器
低圧遮断器 トップ
スプリングクランプ端子仕様
配線用遮断器
漏電遮断器
直流高電圧対応ノーヒューズ遮断器・ノーヒューズスイッチ
漏電アラーム遮断器・漏洩電流表示付遮断器
単相3線回路専用遮断器
UL登録品
MDUブレーカ
用途別遮断器・特殊環境用遮断器
分電盤用遮断器・制御盤用遮断器
機器用遮断器
低圧気中遮断器
漏電リレー
付属装置・関連機器
低圧開閉器
低圧開閉器 トップ
スプリングクランプ端子仕様
電磁開閉器
電磁接触器
電磁継電器
サーマルリレー
用途別電磁接触器
ソリッドステートコンタクタ
マニュアルモータスタータ
関連機器
電力管理用計器
電力管理用計器 トップ
電力量計
計器用変成器
指示電気計器
トランスデューサ
パルス検出器・変換器・合成器
自動力率調整装置
集合形漏電監視装置
タイムスイッチ
高圧配電制御機器
配電用変圧器
配電用変圧器 トップ
配電用油入変圧器
配電用モールド変圧器
H種絶縁乾式変圧器
進相コンデンサ設備
進相コンデンサ設備 トップ
進相コンデンサ
直列リアクトル
進相コンデンサ設備
特定用途コンデンサ
放電コイル
交流フィルタ設備
高圧遮断器・高圧電磁接触器
高圧遮断器・高圧電磁接触器 トップ
真空遮断器
真空電磁接触器
高圧盤用機器引出ユニット
更新用真空遮断器・真空電磁接触器
関連器具
保護継電器
保護継電器 トップ
ディジタル形保護継電器(MELPRO-Aシリーズ)
ディジタル形保護継電器(MELPRO-Dシリーズ)
ディジタル形保護継電器(MELPRO-Sシリーズ)
マルチリレー(MP11A)
電力ヒューズ
電力ヒューズ トップ
限流ヒューズ
低圧ヒューズ
負荷開閉器・断路器
負荷開閉器・断路器 トップ
屋内用負荷開閉器
励突抑制開閉器(エネセーバ)
高調波引込み現象防止機能付開閉器(ハーモニックスセーバ)
断路器
関連器具
省エネ・検針・配電監視システム
省エネ支援機器
省エネ支援機器 トップ
エネルギー計測ユニット
省エネデータ収集サーバ
デマンド監視制御装置
MELSEC iQ-Rシリーズ
MELSEC-Qシリーズ
省エネ支援ソフトウェア
検針・配電監視システム
検針・配電監視システム トップ
電力エネルギー管理システム
集中自動検針システム
システム端末機器
産業用換気送風機・UPS・コントロールセンタ
産業用換気送風機
産業用換気送風機 トップ
有圧換気扇
空調用送風機
気流応用商品
無停電電源装置(UPS)
無停電電源装置(UPS) トップ
無停電電源装置(5kVA以下)
無停電電源装置(5kVA超)
コントロールセンタ
コントロールセンタ トップ
低圧モータコントロールセンタ
高圧コントロールセンタ
モータ診断関連製品
レーザ加工機
レーザ加工機 MELLASER
レーザ加工機 MELLASER トップ
二次元レーザ加工機
三次元レーザ加工機
レーザ細孔加工機
基板穴あけ用レーザ加工機
レーザ自動化システム
CAD/CAM、周辺ソフトウェア
生産・保守支援サービス
放電加工機
放電加工機(EDM)
放電加工機(EDM) トップ
ワイヤ放電加工機
形彫放電加工機
細穴放電加工機
マルチワイヤ放電スライス加工機
自動化システム、周辺装置
CAD/CAM、周辺ソフトウェア
生産・保守支援サービス
リニューアルマシン
金属3Dプリンタ・電子ビーム加工機
金属3Dプリンタ(AM)
金属3Dプリンタ(AM) トップ
ワイヤ・レーザ金属3Dプリンタ
電子ビーム金属3Dプリンタ
電子ビーム加工機(EBM)
電子ビーム加工機(EBM) トップ
インデックスタイプ
ツインチャンバータイプ
カセット・シャトルタイプ
汎用タイプ
微細接合タイプ
Fine Process Control タイプ
高電圧タイプ
FA関連会社
三菱電機エンジニアリング
三菱電機メカトロニクスエンジニアリング
エニイワイヤ
ネットワーク
CC-Link IE TSN
CC-Link IE コントローラネットワーク
CC-Link IE フィールドネットワーク
CC-Link IE フィールドネットワーク Basic
AnyWire
SSCNET III/H
ソリューションソフトウェア
見える化ソフトウェア
見える化ソフトウェア トップ
SCADAソフトウェアGENESIS64™
表示器GOT ソフトウェア
システムレコーダ関連ソフトウェア
e-F@ctory支援モジュール(サンプルプロジェクト)
NC Machine Tool Optimizer
遠隔監視ソフトウェア
遠隔監視ソフトウェア トップ
表示器GOT ソフトウェア
SCADAソフトウェアGENESIS64™
MX Component for iOS/Android
シミュレーションソフトウェア
シミュレーションソフトウェア トップ
3Dシミュレータ MELSOFT Gemini
ロジックシミュレータ MELSOFT Mirror
3次元ロボットシミュレータ RT ToolBox3
データ分析ソフトウェア
データ分析ソフトウェア トップ
MELSOFT MaiLab
データ分析サービス
e-F@ctory支援モジュール(サンプルプロジェクト)
データ通信ソフトウェア
データ通信ソフトウェア トップ
MX Component
MX Sheet
MX Component for iOS/Android
EZ Socket
GOT2000用 MESインタフェース機能ライセンス
省エネ支援ソフトウェア
省エネ支援ソフトウェア トップ
省エネ支援アプリケーション EcoAdviser
日月報・原単位分析ソフトウェア EcoMeasureⅢ
画像処理ソフトウェア
画像処理ソフトウェア トップ
外観検査ソフトウェア MELSOFT VIXIO
FAエンジニアリングソフトウエア
統合エンジニアリングソフトウェア
統合エンジニアリングソフトウェア トップ
iQ Works
iQ AppPortal
シーケンサ MELSEC ソフトウェア
シーケンサ MELSEC ソフトウェア トップ
iQ Works
GX Works3
GX Works2
PX Developer
MX Component
MX Sheet
MX Component for iOS/Android
GX VideoViewer Pro
GX VideoViewer
GX LogViewer
FieldDeviceConfigurator
周辺機器開発支援ツール
その他開発支援ツール
サーボシステムコントローラ ソフトウェア
サーボシステムコントローラ ソフトウェア トップ
MT Works2
GX Works3
ACサーボ MELSERVO ソフトウェア
ACサーボ MELSERVO ソフトウェア トップ
MR Configurator2
容量選定 Motorizer
インバータ FREQROL ソフトウェア
インバータ FREQROL ソフトウェア トップ
FR Configurator2
表示器GOT ソフトウェア
表示器GOT ソフトウェア トップ
GT Works3
GT Works音声合成ライセンス
GT Works3 アドオンライセンス GOT2000 駆動機器(サーボ) 連携プロジェクトデータ用
産業用・協働ロボット MELFAソフトウェア
産業用・協働ロボット MELFAソフトウェア トップ
RT ToolBox3
RT VisualBox
NCソフトウェアツール
NCソフトウェアツール トップ
NC Servo Selection
NC Designer2
NC Configurator2
NC Analyzer2
NC Explorer
NC Monitor2
NC Trainer2 / NC Trainer2 plus
Remote Monitor Tool (C70)
NC Virtual Simulator
NC Machine Tool Optimizer
サービス
iQ Care Remote4U
iQ Care Remote4U トップ
CNC Remote4U
放電加工機 Remote4U
レーザ加工機 Remote4U
クラウド検針サービス
クラウド検針サービス トップ
製品セキュリティへの取り組み
Media Library
製品仕様
規格適合品
生産終了品
機種選定ポータル
輸出該非情報
カタログ資料請求
機器総合カタログ
サービス・サポート
サービス・サポート
サービス・サポート トップ
FA製品の修理・調査
修理・調査
FA機器/配電制御機器
加工機
CNC
設備や機器の延命・リニューアル
FA機器メンテナンス
FA機器リニューアルツール・周辺機器
リニューアルマシン
ユニットリプレース
レトロフィット&リプレース
保全業務の効率化
Genesis64保守サービス
iQ Care MELFA Support
三菱小容量UPS保守サービス
放電加工機リモートサービス
放電加工機 保守・契約商品
レーザ加工機リモートサービス
レーザ加工機 保守・契約商品
CNCリモートサービス
CNC 保守・契約商品
CNC予防保全商品
生産現場の作業改善
FAデータ分析サービス
ロボットシステムソリューション
無線機器貸出しサービス
小規模設備IoT化支援サービス
現地作業立上げ
現地工事・エンジニアリング
無線環境調査・接続サービス
三菱電機FA製品の学習
トレーニングスクール
FA eラーニング
輸出該非情報
国内ビジネスサポート
電話技術相談
短納期サービス
3年保証
優遇税制・補助金
グローバルビジネスサポート
FA用語辞典
FA用語解説集
FA現場フレーズ集
FA現場単語集
eラーニング(グローバル)
サテライトトレーニング
地域別サポート
中国・アセアン地域 パートナー企業ご紹介
CNCグローバルサービスサポート
国内販売拠点
グローバル拠点
よくあるご質問(FAQ)
ダウンロード
ダウンロード
ダウンロード トップ
カタログ
産業用PC
産業用PC MELIPC
Edgecross対応ソフトウェア
制御機器
シーケンサ MELSEC
MELSEC iQ-Rシリーズ
MELSEC iQ-Fシリーズ
MELSEC-Qシリーズ
MELSEC-Lシリーズ
MELSEC-Fシリーズ
MELSEC-QS/WSシリーズ
MELSEC-Aシリーズ
ネットワーク関連製品
エンジニアリングソフトウェア
サーボシステムコントローラ
データ収集アナライザ MELQIC
数値制御装置
数値制御装置(CNC)
FAセンサ
FAセンサ MELSENSOR
駆動機器
ACサーボ MELSERVO
サーボモータ用減速機
センサレスサーボ
インバータ FREQROL
三相モータ
ギヤードモータ
電磁クラッチ・ブレーキ
テンションコントローラ
HMI
表示器 GOT
ロボット
産業用ロボット MELFA
協働ロボット ASSISTA
低圧配電制御機器
低圧遮断器
低圧開閉器
電力管理用計器
高圧配電制御機器
配電用変圧器
進相コンデンサ設備
高圧遮断器・高圧電磁接触器
保護継電器
電力ヒューズ
負荷開閉器・断路器
省エネ・検針・配電監視システム
省エネ支援機器
検針・配電監視システム
産業用換気送風機・UPS・コントロールセンタ
産業用換気送風機
無停電電源装置(UPS)
コントロールセンタ
レーザ加工機
レーザ加工機 MELLASER
放電加工機
放電加工機(EDM)
金属3Dプリンタ・電子ビーム加工機
金属3Dプリンタ(AM)
電子ビーム加工機(EBM)
ソリューションソフトウェア
見える化ソフトウェア
SCADAソフトウェアGENESIS64™
表示器GOT ソフトウェア
e-F@ctory支援モジュール
NC Machine Tool Optimizer
遠隔監視ソフトウェア
表示器GOT ソフトウェア
SCADAソフトウェアGENESIS64™
シミュレーションソフトウェア
3Dシミュレータ MELSOFT Gemini
ロジックシミュレータ MELSOFT Mirror
データ分析ソフトウェア
MELSOFT MaiLab
データ分析サービス
e-F@ctory支援モジュール
省エネ支援ソフトウェア
省エネ支援アプリケーション EcoAdviser
日月報・原単位分析ソフトウェア EcoMeasureⅢ
画像処理ソフトウェア
外観検査ソフトウェア MELSOFT VIXIO
エンジニアリングソフトウェア
統合エンジニアリングソフトウェア
iQ Works
iQ AppPortal
シーケンサ MELSEC ソフトウェア
iQ Works
GX Works3
GX Works2
GX VideoViewer Pro
GX VideoViewer
GX LogViewer
サーボシステムコントローラ ソフトウェア
GX Works3
インバータ FREQROL ソフトウェア
FR Configurator2
表示器GOT ソフトウェア
GT Works3
NCソフトウェアツール
NC Servo Selection
NC Designer2
NC Configurator2
NC Analyzer2
NC Explorer
NC Monitor2
NC Trainer2 / NC Trainer2 plus
NC Machine Tool Optimizer
サービス
iQ Care Remote4U
CNC Remote4U
放電加工機 Remote4U
レーザ加工機 Remote4U
クラウド検針サービス
モバイル検針サービス
ソリューション
e-F@ctory
業種別ソリューション
目的別ソリューション
e-F@ctoryソリューション
FAリモートソリューション
カーボンニュートラルソリューション
トータル保全ソリューション
機械加工ラインDXソリューション
計装ソリューション
データ収集ソリューション
組み込みシステムソリューション
安全ソリューション
センサソリューション
その他
その他
iQ Platform
サービス
マニュアル
産業用PC
産業用PC MELIPC
Edgecross対応ソフトウェア
制御機器
シーケンサ MELSEC
MELSEC iQ-Rシリーズ
MELSEC iQ-Fシリーズ
MELSEC-Qシリーズ
MELSEC-Lシリーズ
MELSEC-Fシリーズ
MELSEC-QS/WSシリーズ
MELSEC-Aシリーズ
ネットワーク関連製品
エンジニアリングソフトウェア
MELSEC-K(販売終了)
FAコントローラ LM(販売終了)
IDシステム(販売終了)
サーボシステムコントローラ
データ収集アナライザ MELQIC
数値制御装置
数値制御装置(CNC)
FAセンサ
FAセンサ MELSENSOR
駆動機器
ACサーボ MELSERVO
センサレスサーボ
インバータ FREQROL
三相モータ
ギヤードモータ
電磁クラッチ・ブレーキ
テンションコントローラ
HMI
表示器 GOT
ロボット
産業用ロボット MELFA
協働ロボット ASSISTA
低圧配電制御機器
低圧遮断器
低圧開閉器
電力管理用計器
高圧配電制御機器
配電用変圧器
進相コンデンサ設備
高圧遮断器・高圧電磁接触器
保護継電器
電力ヒューズ
負荷開閉器・断路器
省エネ・検針・配電監視システム
省エネ支援機器
検針・配電監視システム
産業用換気送風機・UPS・コントロールセンタ
産業用換気送風機
無停電電源装置(UPS)
コントロールセンタ
放電加工機
放電加工機(EDM)
ソリューションソフトウェア
見える化ソフトウェア
SCADAソフトウェアGENESIS64™
表示器GOT ソフトウェア
システムレコーダ関連ソフトウェア
NC Machine Tool Optimizer
遠隔監視ソフトウェア
表示器GOT ソフトウェア
SCADAソフトウェアGENESIS64™
MX Component for iOS/Android
シミュレーションソフトウェア
3Dシミュレータ MELSOFT Gemini
ロジックシミュレータ MELSOFT Mirror
3次元ロボットシミュレータ RT ToolBox3
データ分析ソフトウェア
MELSOFT MaiLab
データ通信ソフトウェア
MX Component
MX Sheet
MX Component for iOS/Android
GOT2000用 MESインタフェース機能ライセンス
省エネ支援ソフトウェア
省エネ支援アプリケーション EcoAdviser
日月報・原単位分析ソフトウェア EcoMeasureⅢ
画像処理ソフトウェア
外観検査ソフトウェア MELSOFT VIXIO
エンジニアリングソフトウェア
統合エンジニアリングソフトウェア
iQ Works
iQ AppPortal
シーケンサ MELSEC ソフトウェア
iQ Works
GX Works3
GX Works2
PX Developer
MX Component
MX Sheet
MX Component for iOS/Android
GX VideoViewer Pro
GX VideoViewer
GX LogViewer
FieldDeviceConfigurator
サーボシステムコントローラ ソフトウェア
MT Works2
GX Works3
ACサーボ MELSERVO ソフトウェア
MR Configurator
MR Configurator2
インバータ FREQROL ソフトウェア
FR Configurator2
表示器GOT ソフトウェア
GT Works3
産業用・協働ロボット MELFAソフトウェア
RT ToolBox3
RT ToolBox2
RT VisualBox
NCソフトウェアツール
NC Designer2
NC Configurator2
NC Analyzer2
NC Explorer
NC Monitor2
NC Trainer2 / NC Trainer2 plus
NC Machine Tool Optimizer
サービス
iQ Care Remote4U
CNC Remote4U
クラウド検針サービス
モバイル検針サービス
ソリューション
e-F@ctory
センサソリューション
その他
スクールテキスト
FA機器入門テキスト
技術資料
産業用PC
産業用PC MELIPC
Edgecross対応ソフトウェア
制御機器
シーケンサ MELSEC
MELSEC iQ-Rシリーズ
MELSEC iQ-Fシリーズ
MELSEC-Qシリーズ
MELSEC-Lシリーズ
MELSEC-Fシリーズ
MELSEC-QS/WSシリーズ
MELSEC-Aシリーズ
ネットワーク関連製品
エンジニアリングソフトウェア
MELSEC-K(販売終了)
FAコントローラLM(販売終了)
IDシステム(販売終了)
サーボシステムコントローラ
データ収集アナライザ MELQIC
数値制御装置
数値制御装置(CNC)
FAセンサ
FAセンサ MELSENSOR
駆動機器
ACサーボ MELSERVO
センサレスサーボ
インバータ FREQROL
三相モータ
ギヤードモータ
電磁クラッチ・ブレーキ
テンションコントローラ
HMI
表示器 GOT
ロボット
産業用ロボット MELFA
協働ロボット ASSISTA
低圧配電制御機器
低圧遮断器
低圧開閉器
電力管理用計器
高圧配電制御機器
配電用変圧器
進相コンデンサ設備
高圧遮断器・高圧電磁接触器
保護継電器
電力ヒューズ
負荷開閉器・断路器
省エネ・検針・配電監視システム
省エネ支援機器
検針・配電監視システム
産業用換気送風機・UPS・コントロールセンタ
無停電電源装置(UPS)
コントロールセンタ
レーザ加工機
レーザ加工機 MELLASER
放電加工機
放電加工機(EDM)
金属3Dプリンタ・電子ビーム加工機
金属3Dプリンタ(AM)
ソリューションソフトウェア
見える化ソフトウェア
SCADAソフトウェアGENESIS64™
表示器GOT ソフトウェア
遠隔監視ソフトウェア
表示器GOT ソフトウェア
SCADAソフトウェアGENESIS64™
シミュレーションソフトウェア
3次元ロボットシミュレータ RT ToolBox3
データ分析ソフトウェア
MELSOFT MaiLab
FAアプリケーションパッケージ
iQ Monozukuri アンドン
iQ Monozukuri スマート作業ナビゲータ
iQ Monozukuri 回転機振動診断
データ通信ソフトウェア
MX Sheet
省エネ支援ソフトウェア
日月報・原単位分析ソフトウェア EcoMeasureⅢ
画像処理ソフトウェア
外観検査ソフトウェア MELSOFT VIXIO
エンジニアリングソフトウェア
統合エンジニアリングソフトウェア
iQ Works
シーケンサ MELSEC ソフトウェア
iQ Works
GX Works3
GX Works2
PX Developer
MX Sheet
ACサーボ MELSERVO ソフトウェア
MR Configurator2
表示器GOT ソフトウェア
GT Works3
産業用・協働ロボット MELFAソフトウェア
RT ToolBox3
RT ToolBox2
RT VisualBox
外形図・CAD
産業用PC
産業用PC MELIPC
制御機器
シーケンサ MELSEC
MELSEC iQ-Rシリーズ
MELSEC iQ-Fシリーズ
MELSEC-Qシリーズ
MELSEC-Lシリーズ
MELSEC-Fシリーズ
MELSEC-QS/WSシリーズ
MELSEC-Aシリーズ
ネットワーク関連製品
サーボシステムコントローラ
数値制御装置
数値制御装置(CNC)
FAセンサ
FAセンサ MELSENSOR
駆動機器
ACサーボ MELSERVO
サーボモータ用減速機
センサレスサーボ
インバータ FREQROL
三相モータ
ギヤードモータ
電磁クラッチ・ブレーキ
テンションコントローラ
HMI
表示器 GOT
ロボット
産業用ロボット MELFA
協働ロボット ASSISTA
低圧配電制御機器
低圧遮断器
低圧開閉器
電力管理用計器
高圧配電制御機器
配電用変圧器
進相コンデンサ設備
高圧遮断器・高圧電磁接触器
保護継電器
電力ヒューズ
負荷開閉器・断路器
省エネ・検針・配電監視システム
省エネ支援機器
検針・配電監視システム
産業用換気送風機・UPS・コントロールセンタ
無停電電源装置(UPS)
ソフトウェア
産業用PC
産業用PC MELIPC
Edgecross対応ソフトウェア
制御機器
シーケンサ MELSEC
MELSEC iQ-Rシリーズ
MELSEC iQ-Fシリーズ
MELSEC-Qシリーズ
MELSEC-Lシリーズ
MELSEC-Fシリーズ
MELSEC-QS/WSシリーズ
MELSEC-Aシリーズ
ネットワーク関連製品
エンジニアリングソフトウェア
サーボシステムコントローラ
データ収集アナライザ MELQIC
数値制御装置
数値制御装置(CNC)
FAセンサ
FAセンサ MELSENSOR
駆動機器
ACサーボ MELSERVO
センサレスサーボ
インバータ FREQROL
三相モータ
電磁クラッチ・ブレーキ
テンションコントローラ
HMI
表示器 GOT
ロボット
産業用ロボット MELFA
協働ロボット ASSISTA
低圧配電制御機器
低圧遮断器
電力管理用計器
高圧配電制御機器
保護継電器
省エネ・検針・配電監視システム
省エネ支援機器
検針・配電監視システム
産業用換気送風機・UPS・コントロールセンタ
産業用換気送風機
無停電電源装置(UPS)
放電加工機(EDM)・CAD/CAM
放電加工機(EDM)
CAD/CAM
ソリューションソフトウェア
見える化ソフトウェア
SCADAソフトウェアGENESIS64™
表示器GOT ソフトウェア
システムレコーダ関連ソフトウェア
遠隔監視ソフトウェア
表示器GOT ソフトウェア
SCADAソフトウェアGENESIS64™
MX Component for iOS/Android
シミュレーションソフトウェア
3Dシミュレータ MELSOFT Gemini
ロジックシミュレータ MELSOFT Mirror
3次元ロボットシミュレータ RT ToolBox3
データ分析ソフトウェア
MELSOFT MaiLab
データ通信ソフトウェア
MX Component
MX Sheet
MX Component for iOS/Android
省エネ支援ソフトウェア
省エネ支援アプリケーション EcoAdviser
日月報・原単位分析ソフトウェア EcoMeasureⅢ
画像処理ソフトウェア
外観検査ソフトウェア MELSOFT VIXIO
エンジニアリングソフトウェア
統合エンジニアリングソフトウェア
シーケンサ MELSEC ソフトウェア
サーボシステムコントローラ ソフトウェア
ACサーボ MELSERVO ソフトウェア
インバータ FREQROL ソフトウェア
表示器GOT ソフトウェア
産業用・協働ロボット MELFAソフトウェア
NCソフトウェアツール
サービス
クラウド検針サービス
モバイル検針サービス
ソリューション
e-F@ctory
その他
FA統合機種選定ツール(オフライン版)
サンプルライブラリ
産業用PC
産業用PC MELIPC
Edgecross対応ソフトウェア
制御機器
シーケンサ MELSEC
MELSEC iQ-Rシリーズ
MELSEC iQ-Fシリーズ
MELSEC-Qシリーズ
MELSEC-Lシリーズ
MELSEC-Fシリーズ
MELSEC-QS/WSシリーズ
ネットワーク関連製品
サーボシステムコントローラ
データ収集アナライザ MELQIC
FAセンサ
FAセンサ MELSENSOR
駆動機器
ACサーボ MELSERVO
インバータ FREQROL
テンションコントローラ
HMI
表示器 GOT
ロボット
産業用ロボット MELFA
協働ロボット ASSISTA
低圧配電制御機器
低圧遮断器
電力管理用計器
省エネ・検針・配電監視システム
省エネ支援機器
検針・配電監視システム
産業用換気送風機・UPS・コントロールセンタ
無停電電源装置(UPS)
ソリューションソフトウェア
見える化ソフトウェア
表示器GOT ソフトウェア
遠隔監視ソフトウェア
表示器GOT ソフトウェア
データ分析ソフトウェア
MELSOFT MaiLab
画像処理ソフトウェア
外観検査ソフトウェア MELSOFT VIXIO
エンジニアリングソフトウェア
シーケンサ MELSEC ソフトウェア
サーボシステムコントローラ ソフトウェア
ACサーボ MELSERVO ソフトウェア
インバータ FREQROL ソフトウェア
表示器GOT ソフトウェア
産業用・協働ロボット MELFAソフトウェア
カタログ資料請求
機器総合カタログ
イベント・セミナー
イベント・セミナー
イベント・セミナー トップ
イベント情報
イベント・セミナー一覧
FAバーチャル展示場
バーチャルショールーム
トレーニングスクール
FA eラーニング
ショールーム・テストラボ
名古屋製作所 FAコミュニケーションセンター
「FA機器・システム」ショールーム
産業メカトロニクス製作所 FAコミュニケーションセンター
「産業メカトロニクス」ショールーム
福山製作所テクニカルホール
東日本FAソリューションセンター
東日本メカトロソリューションセンター
西日本メカトロソリューションセンター
テストラボ
iQスクエア
ロボット・センサ
オンライン工場見学
名古屋製作所
名古屋製作所 新城工場
福山製作所
Media Library
カタログ資料請求
The Art of Manufacturing
(FAデジタルマガジン)
FA Web Shop
三菱電機FAについて
お問い合わせ
マイページ
メンバー登録
マイページ保存
ログイン
ログアウト
お問い
合わせ
購入・見積もり
仕様・機能
FAQ
チャット
ボット
シェア
Twitter
Facebook
LinkedIn
e-mail
ここから本文
製品メニュー
ACサーボ MELSERVO
製品一覧
製品特長
ラインアップ
MELSERVO-J5
MELSERVO-J4
MELSERVO-JN
MELSERVO その他
ソフトウェア特長
目的の製品を探す
サーボシステムパートナー
ダウンロード
カタログ
マニュアル
技術資料
ソフトウェア
サンプルライブラリ 他
外形図・CAD
関連リンク
FA eラーニング
トレーニングスクール
技術用語
RoHS指令への取組みなど
MELSERVO-J4シリーズ サーボアンプ
お問い合わせ
[
購入・見積もり
|
仕様・機能
|
よくあるご質問
]
サーボアンプ
回転型サーボモータ
リニアサーボモータ
ダイレクトドライブモータ
コンセプト
機能紹介
特長-機械と
特長-人と
特長-環境と
特長-継承と
形名構成
1軸サーボアンプとサーボモータ組合せ
1軸サーボアンプと機能安全対応サーボモータ組合せ
多軸一体サーボアンプとサーボモータ組合せ
サーボアンプ形名構成
ユニット形名構成
サーボアンプ形名構成
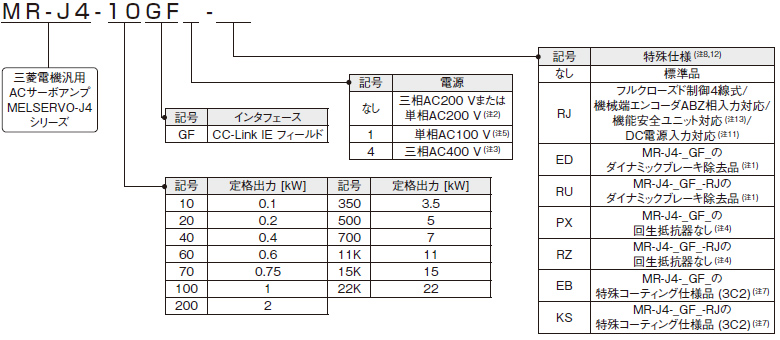
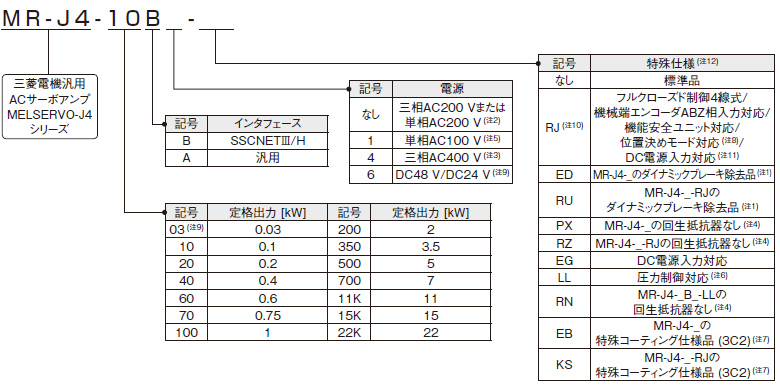
1軸サーボアンプ形名構成
(注14)
注)
7 kW以下のサーボアンプに内蔵されているダイナミックブレーキが除去されたタイプです。ダイナミックブレーキ除去品使用時は、アラーム発生時や電源遮断時などにサーボモータがフリーラン停止となるため、急停止しません。装置全体で安全を確保してください。また、特定のサーボモータ使用時にアラームが発生した場合、電子式ダイナミックブレーキが作動することがあります。電子式ダイナミックブレーキは、サーボパラメータを設定することで解除可能です。 詳細については、各サーボアンプ技術資料集を参照してください。
単相AC200 Vは0.1 kW~2 kWのサーボアンプのみです。
0.6 kWおよび1 kW以上のサーボアンプのみです。
11 kW~22 kWのサーボアンプで標準付属品である回生抵抗器が付属しないタイプです。詳細については、各サーボアンプ技術資料集を参照してください。
0.1 kW~0.4 kWのサーボアンプのみです。
MR-J4-_B_-LLのみです。圧力制御対応サーボアンプについては、『MR-J4-_B_-LL MR-J4-DU_B_LL サーボアンプ技術資料集』を参照してください。
サーボアンプの基板に特殊コーティング (JIS C 60721-3-3:1997/IEC 60721-3-3:1994 分類3C2) を施したタイプです。詳細については、各サーボアンプ技術資料集を参照してください。
位置決めモードは、MR-J4-GF(-RJ)/MR-J4-A-RJサーボアンプで対応しています。
MR-J4-03A6(-RJ)サーボアンプのみです。
MR-J4-03A6-RJは位置決めモードのみ対応しています。フルクローズド制御、機械端エンコーダABZ相入力、および機能安全ユニットには対応していません。
200 Vのみです。
各機能が対応しているサーボアンプのソフトウェアバージョンについては、各ユニットの仕様ページを参照してください。
CC-Link IEフィールドネットワーク Basicで使用する場合、MR-D30機能安全ユニットは対応していません。
ここでは形名の内容を説明しています。全ての記号の組合せが存在するものではありません。
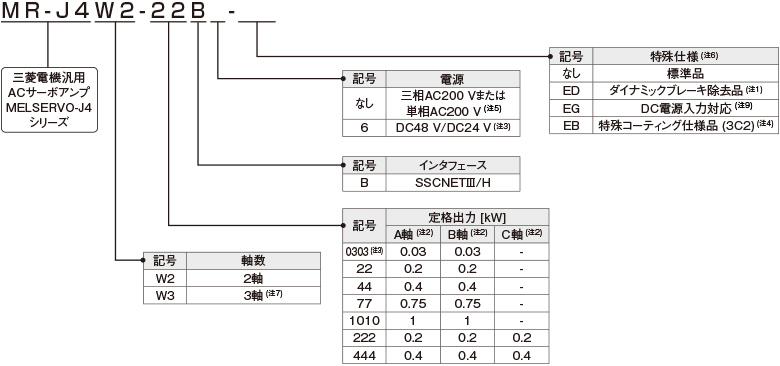
多軸一体サーボアンプ形名構成
(注8)
注)
サーボアンプに内蔵されているダイナミックブレーキが除去されたタイプです。ダイナミックブレーキ除去品使用時は、アラーム発生時や電源遮断時などにサーボモータがフリーラン停止となるため、急停止しません。装置全体で安全を確保してください。また、特定のサーボモータ使用時にアラームが発生した場合、電子式ダイナミックブレーキが作動することがあります。電子式ダイナミックブレーキは、サーボパラメータを設定することで解除可能です。詳細については、各サーボアンプ技術資料集を参照してください。
A軸、B軸、C軸は多軸一体サーボアンプの軸名称を表します。C軸は3軸一体サーボアンプの場合です。
MR-J4W2-0303B6サーボアンプのみです。
サーボアンプの基板に特殊コーティング (JIS C 60721-3-3:1997/IEC 60721-3-3:1994 分類3C2) を施したタイプです。詳細については、各サーボアンプ技術資料集を参照してください。
単相AC200 Vは0.2 kW~0.75 kWのサーボアンプのみです。
各機能が対応しているサーボアンプのソフトウェアバージョンについては、各ユニットの仕様ページを参照してください。
0.2 kWおよび0.4 kWのみです。
ここでは形名の内容を説明しています。全ての記号の組合せが存在するものではありません。
詳細については、営業窓口にお問合せください。
ページトップに戻る
ユニット形名構成
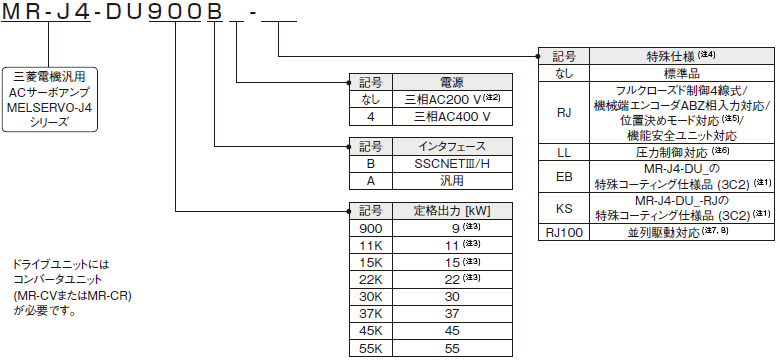
ドライブユニット形名構成
注)
30 kW以上のドライブユニットの基板に特殊コーティング (JIS C 60721-3-3:1997/IEC 60721-3-3:1994 分類3C2) を施したタイプです。詳細については、各サーボアンプ技術資料集を参照してください。
三相AC200 Vは37 kW以下のドライブユニットのみです。
MR-J4-DU_B_(-RJ) のみです。
各機能が対応しているドライブユニットのソフトウェアバージョンについては、各ユニットの仕様ページを参照してください。
位置決めモードは、MR-J4-DU_A_-RJドライブユニットで対応しています。
30 kW以上のMR-J4-DU_B_-LLのみです。圧力制御対応ドライブユニットについては、『MR-J4-_B_-LL MR-J4-DU_B_LL サーボアンプ技術資料集』を参照してください。
三相AC400 V、45 kW以上のドライブユニットのみです。
対応コントローラについては、「
対応コントローラ
」を参照してください。
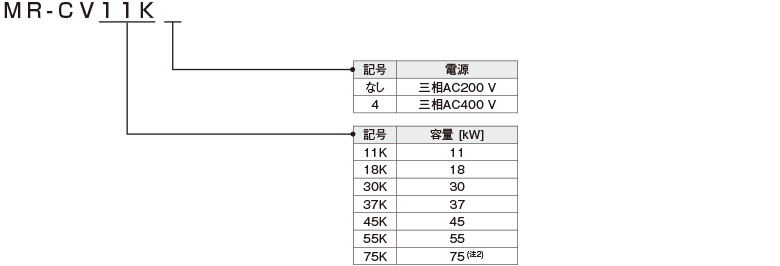
電源回生コンバータユニット形名構成
(注1, 3)
注)
電源回生コンバータユニットと組み合わせられるドライブユニットはMR-J4-DU_B(4)(-RJ) およびMR-J4-DU_B4-RJ100です。
MR-J4-DU_A(4)(-RJ) と組み合わせることはできません。
MR-J4-_B(4)(-RJ)サーボアンプとの組合せについては、『MR-CV_ MR-CR55K_ MR-J4-DU_B_(-RJ) MR-J4-DU_A_(-RJ) 技術資料集』を参照してください。
400 Vの電源回生コンバータユニットのみです。
ここでは形名の内容を説明しています。全ての記号の組合せが存在するものではありません。
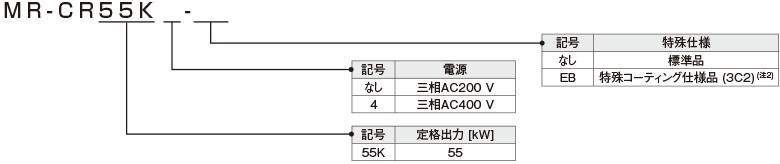
抵抗回生コンバータユニット形名構成
(注1, 3)
注)
ドライブユニット1台につき、1台の抵抗回生コンバータユニットが必要です。
抵抗回生コンバータユニットの基板に特殊コーティング (JIS C 60721-3-3:1997/IEC 60721-3-3:1994 分類3C2) を施したタイプです。
詳細については、『MR-CV_ MR-CR55K_ MR-J4-DU_B_(-RJ) MR-J4-DU_A_(-RJ) 技術資料集』を参照してください。
抵抗回生コンバータユニットと組み合わせられるドライブユニットは、30 KW以上のMR-J4-DU_B(4)(-RJ) および
MR-J4-DU_A(4)(-RJ)です。MR-J4-DU_B4-RJ100および22 kW以下のMR-J4-DU_B(4)(-RJ)と組み合わせることはできません。
ページトップに戻る
コンセプト
機能紹介
特長-機械と
特長-人と
特長-環境と
特長-継承と
形名構成
1軸サーボアンプとサーボモータ組合せ
1軸サーボアンプと機能安全対応サーボモータ組合せ
多軸一体サーボアンプとサーボモータ組合せ
サーボアンプ
回転型サーボモータ
リニアサーボモータ
ダイレクトドライブモータ
サポート情報
国内外のサポート・販売拠点
国内サポート情報
国内拠点情報
海外サポート情報
海外拠点情報
製品利用に関する学習情報
定期トレーニングスクール
FA eラーニング
技術用語について
お問い合わせ
[
購入・見積もり
|
仕様・機能
|
よくあるご質問
]
ページトップに戻る
FAトップ
製品情報
駆動機器
ACサーボ MELSERVO
製品特長
MELSERVO-J4